Twisted Bundled Tube Locomotive Device for In-Pipe Mobile Robots
Published: October 20, 2015
There are many pipes around us that require periodic maintenance, and endoscopes are highly effective for inspecting deep areas of small-diameter pipes.
However, such inspection is difficult to achieve in winding pipes of small diameter. Therefore, there is demand for in-pipe mobile robots that can move inside thin pipes.
Now, Toshio Takayama and colleagues at Tokyo Institute of Technology have developed a novel device named the twisted bundled tube locomotive device.
The device consists of three elastic silicone rubber tubes that are twisted around a non-expandable thread and bonded. When these tubes are sequentially pressurized, the device exhibits helical rotation, and it moves along the axis of the pipe.
The 6 mm diameter prototype can move through several pipe diameters in the range 9 to 25 mm. The highest velocity is 45 mm/s in a pipe with a diameter of 20 mm. The prototype is highly flexible and easily passes through pipe elbows without special control. Moreover, the researchers confirmed that if the winding pitch varies, the outer diameter of the helix also changes.
The maximum diameter of the pipe through which the device can progress depends on the outer diameter of the helix. In future studies, the researchers plan to develop a a physical model to predict the outer diameter of the helix.
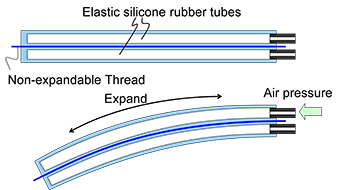
Figure 1. Basic principle of the bending mechanism
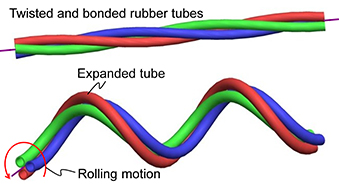
Figure 2. Deformation of the twisted bundled tube device
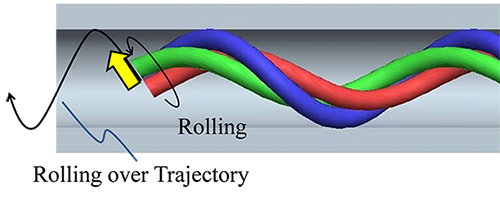
Figure 3. Rolling over trajectory
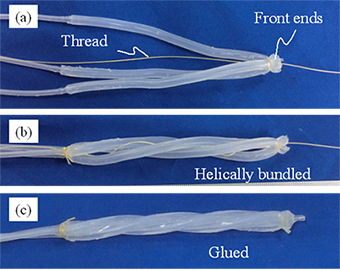
Figure 4. Procedure for making the device.
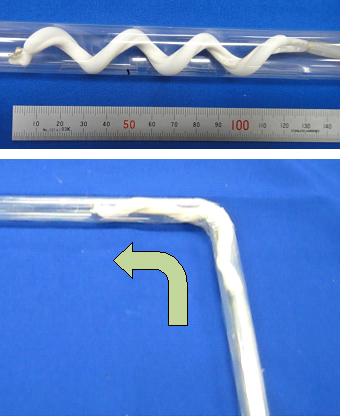
Figure 5. Progress in a small pipe.
Reference
Authors: |
Toshio Takayama, Hirozumi Takeshima, Tomoyuki Hori, and Toru Omata. |
Title of original paper: |
A twisted bundled tube locomotive device proposed for in-pipe mobile robot |
Journal: |
IEEE/ASME Transactions on Mechatronics, IEEE Early Access Articles (2015) |
DOI : |
|




