As part of the Impulsing PAradigm Change through disruptive Technologies Program (ImPACT) Tough Robotics Challenge (Program Manager: Satoshi Tadokoro), which is an initiative of the Cabinet Office Council for Science, Technology and Innovation, the research team including Professor Koichi Suzumori from the Tokyo Institute of Technology and Dr. Ryo Sakurai from the Bridgestone Corporation succeeded in developing a hydraulic drive, high-power artificial muscle. It is one of the keys for realizing tough robots that can be used at extreme disaster sites. The artificial muscle that was developed using rubber tube is extremely powerful but lightweight and has strong resistance to impact and vibration, allowing for the most compact and energy efficient tough robots ever created. It is expected that this will lead to the smallest, lightest, and most powerful consumer robots ever created in the near future.
Points
- "Light yet Powerful" — Ultra lightweight, highly powerful ("Strength-to-weight ratio" that 5 to 10 times greater than conventional electric motors and hydraulic cylinders)
- "Durable" — High durability against impact and vibration achieved through highly durable, and oil-resistant rubber.
- "Gently yet Strong" — Possible to handle various work including jobs requiring strong force and delicate control of power.
Research Background and Details
Through the ImPACT Tough Robotics Challenge, our aim is to bring about "Tough Robots" that are used for rescuing people and ensuring safety in extreme environments after disasters such as the Great East Japan Earthquake Disaster and Han-Shin Awaji Earthquake Disaster. When existing robots are used in disaster situations, a number of problems arise. For example, they "cannot operate at disaster sites", the "situation is unknown", "total breakdown in the event of failure", and they "do not meet the work conditions". These problems must be overcome to achieve the goal of this program.
In this program, in order to create "Tough Robots" with excellent mobility and power that can be utilized for disaster recovery, we are carrying out research and development of "Tough hydraulic actuators", which are a key component. An actuator is a generic term for a device that generates "motion and power" and includes motors and cylinders. Most robots that currently exist are driven by electric motors that are based on technology commonly used for consumer products, but there are problems related to their structure. First, the "strength-to-weight ratio" (calculated by dividing the generated force by the weight of the actuator) is low (heavy and weak). Second, such robots have low resistance to outside impact and vibration (break easily), and third, it is difficult to achieve large power output while also having gentle movement according to the situation.
To address these problems, the Tokyo Institute of Technology and Bridgestone have focused on human muscles, which are capable of outputting a large amount of power while also being capable of flexible movement according to the work being done. Since 2014, we have been collaborating to promote research and development of "Highly powerful artificial muscles" by striving for output greater than that possible by human muscle while also trying to reproduce its flexibility. These artificial muscles consist of rubber tubes and high-tensile fibers, and are actuated by hydraulic pressure. The use of rubber tubes and high-tensile fibers make it possible to achieve smooth movement, and the use of hydraulic pressure makes it possible to achieve a high "strength-to-weight ratio", high shock and vibration resistance, and gentle movement according to the work being done.
This opens up new possibilities for creating robots that have greater "Toughness" than current robots, that are highly resistant to external shock and vibration, that are able to perform high intensity jobs, and also able handle delicate jobs requiring precise power control according to the situation.
Overview of Research Achievement
The high-power artificial muscle that was successfully developed is a kind of McKibben type artificial muscle. As shown in Figure 1, it consists of a rubber tube surrounded by a woven sleeve (many fibers woven into a cylindrical shape). Conventional McKibben type artificial muscles operate at an air pressure of 0.3 to 0.6 MPa (≒ 3 to 6 kgf/cm2), but the artificial muscle that we developed can be used in hydraulic pressure drive, and was able to operate at a pressure of 5 MPa (≒ 50 kgf/cm2), which is much higher than conventional McKibben type artificial muscles. Therefore, it was possible to generate a significantly higher amount of power. Our research team (1) developed a new rubber material that has excellent oil resistance and deformation characteristics, (2) adjusted the method for weaving the high-tension chemical fibers, and (3) worked to develop a technique for tightening tube ends that can resist high pressures. As a result, we were able to achieve an innovative, lightweight, and highly powerful artificial muscle that has excellent pressure resistance and oil resistance, and that is capable of converting high hydraulic pressure into efficient power generation. It is an innovative actuator with a "strength-to-weight ratio" that is 5 to 10 times greater than conventional electric motors and hydraulic cylinders.
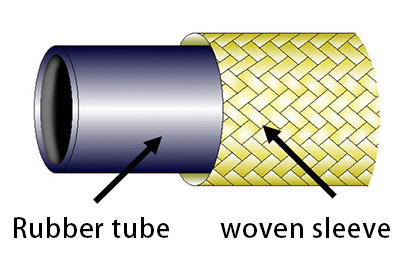
Figure 1. Structure of a McKibben artificial muscle
The artificial muscle that we developed consists of a rubber tube surrounded by a woven sleeve, so it is highly resistant to strong external shocks and vibrations. It is expected to lead to tough robots that can handle work where shocks are applied, which is difficult for existing robots driven by electric motors to handle (for example, making holes in walls using an impact drill, chipping concrete walls, etc.).
Figure 2 and Figure 3 show the operation and characteristics of the sample artificial muscle that we developed. Figure 4 shows an application example for a simple rubber joint.
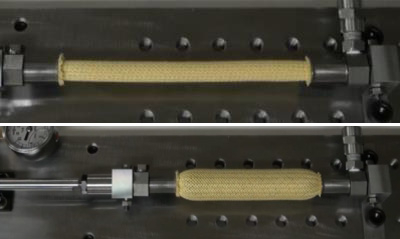
Figure 2. Operation example of the "Hydraulic High-Power Artificial Muscle"
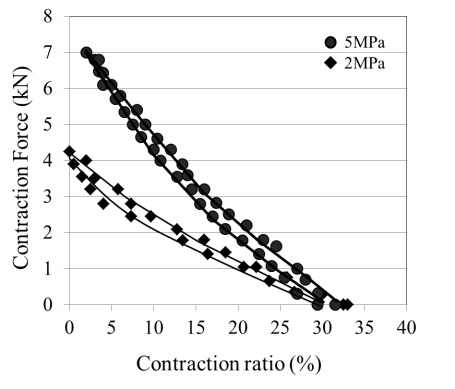
Figure 3. Characteristics of the developed artificial muscle
Outer diameter: 15 mm, Maximum contraction force: 7 kN (= 700 kgf), Maximum contraction ratio: 30%.
The contraction ratio is calculated by dividing the artificial muscle contraction amount by its original length.
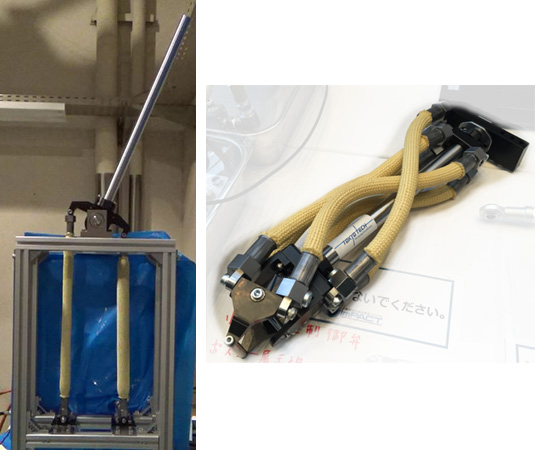
Figure 4. Application example of a robot arm
Left: Robot arm using two artificial muscles, Right: Robot wrist using six artificial muscles.
Demonstration: High-Power Hydraulic Artificial Muscle for Tough Robots
Future Development
We will continue to proceed with development and implementation of tough robots that use this artificial muscle in order to contribute to the realization and spread of advanced robot services for a safe and secure society. In addition, we are aiming to achieve higher performance and to help spread its use and development as a consumer-use robot actuator.
ImPACT Program Manager, Satoshi Tadokoro's Remarks
The purpose of the ImPACT Tough Robotics Challenge is to create various "Tough" technologies that are essential for robots used for disaster prevention and emergency response and recovery, rescue, and humanitarian support, and to establish industrial innovations through the creation of new projects along with social innovation for disaster prevention. We are promoting such project research development.
Robots that operate at disaster areas need to be lightweight, powerful, capable of controlling large forces precisely, have sufficient shock resistance, and other "Mechanical Toughness", which is different from those used indoors and in factories. Methods using electric motors and reduction gears have limitations, so hydraulic actuators are essential. This research has developed a new McKibben type artificial muscle that can be driven by a hydraulic pressure of 5 MPa, and that can generate significantly more power than conventional methods while also being light. In addition, it is possible to minimize sliding friction, which becomes an issue when trying to achieve high precision control, and it has strong resistance to shock. It is expected that this component will allow for great progress to be made toward the practical application of robots in extreme environments such as disasters.
This achievement was made based on the following projects/research projects.
As our research and development subject, we are working on the development of a high-output, high-precision hydraulic actuator, which is an essential technology for the realization of tough robots.







