東工大ニュース
東工大ニュース
![]()
公開日:2012.05.30
東京工業大学大学院情報理工学研究科のジョンチャンヒュン院生と理工学研究科の中島求准教授らは、スイマーの泳ぎを忠実に再現できる水泳ヒューマノイドロボット「SWUMANOID(スワマノイド)」を開発した。実際の競泳選手の身体形状を詳細に測定し、1/2スケールで忠実に再現した。防水処理した20個のモータを内蔵、これをコンピュータ制御することにより、スイマーの複雑な泳ぎの動作を忠実に再現できる。
従来の水泳の研究は、実際の選手を用いた実験測定がほとんどで、人間の動作の再現性に問題があった。これに対し、開発したロボットを用いると、微妙な動作の違いによる推進力の変化をとらえることが可能になる。将来はより速く泳げる動作を解明し、その結果を競泳選手にフィードバックすることや、高速水着の開発などに応用が期待される。
この成果は、8月に台湾にて開催される「エアロ・アクアバイオメカニズム国際会議」で発表する予定。またロボットの動作は動画投稿サイトYouTube(「SWUMANOID」で検索)で見られる。
水泳はポピュラーなスポーツであるが、そのメカニズムは十分解明されているとは言いがたい。特に競泳の研究ではいかにして手足の動きによる推進力を増やし、体が受ける抵抗力を少なくするかが、これまで研究者の間で議論されてきた。従来の研究手法としては、実際のスイマーに泳いでもらい、その動作をカメラで撮影し、撮影映像から動作を分析する手法が多く用いられてきた。しかし人間では同じ動作を繰り返し行うことは困難だった。すなわち、人間の動作の再現性に問題があった。また、人間が水から受けている推進力や抵抗力を測定することも困難だった。
東工大のジョン院生と中島准教授らは、ロボット技術を応用することにより、この問題に取り組んだ。すなわち、スイマーの身体形状や泳ぎの動作を忠実に再現可能な水泳ヒューマノイドロボットを開発するというアプローチを取った。開発にあたっては,まず実際の競泳選手の身体形状を、三次元ボディスキャナ装置を用いて詳細に測定し、三次元造形技術によりロボットで忠実に1/2スケールで再現した。また、防水処理した20個のモータをコンピュータ制御することにより、スイマーの複雑な泳ぎの動作が忠実に再現可能となった。動作制御プログラムを変更すれば、クロール以外にも、平泳ぎ、背泳ぎ、バタフライ、さらには立ち泳ぎや犬かきまで、どんな泳法にも対応できる。
ロボット全体は4本の支柱を介して専用の駆動装置に取り付けられ、ロボットが水から受ける力、すなわち推進力や抵抗力を測定することが可能である。現在はまだ試作段階のため、泳ぎの速さは実際のスイマーのサイズに換算して秒速0.64 メートル(100mで156秒)と遅いが、今後は、改良による高速化と、駆動装置から外した自由遊泳も計画している。なお、このヒューマノイドロボットを「SWUMANOID(スワマノイド)」(「SWimming」と「hUMANOID」を合わせた造語)と名付けた。
このロボットを用いれば、人間の場合と異なり、同じ動作を繰り返し行わせたり、少しだけ異なる動作を行わせたりといったことが容易なため、微妙な動作の違いによる推進力の変化もとらえることが可能となる。また、ロボットに水着を装着すれば、泳いでいる際の抵抗力に水着が及ぼす影響も測定可能である。このため将来は,ロボットを用いた実験により、より速く泳げる動作を解明し、その結果を競泳選手にフィードバックすることや、高速水着の開発などに応用が期待される。
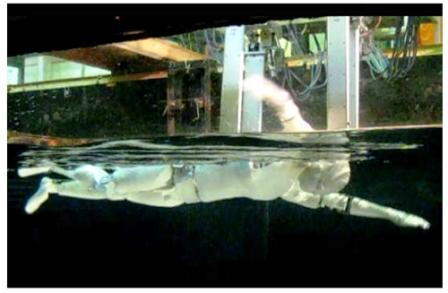
水泳ヒューマノイドロボット「SWUMANOID」の写真
「The Fifth International Sysmposium on Aero Aqua Bio-Mechanisms 第5回エアロ・アクアバイオメカニズム国際会議」2012 年8 月25~28 日開催
論文タイトル “Development of a Swimming Humanoid Robot to Clarify Unsteady Fluid Forces Acting on a Swimmer”
著者 Chung Changhyun and Motomu Nakashima
本件に関するお問い合せ先
中島 求
大学院理工学研究科 機械制御システム専攻 准教授
電話: 03-5734-2586
FAX: 03-5734-2586
E-mail: motomu@mech.titech.ac.jp