東工大ニュース
東工大ニュース
![]()
公開日:2018.03.19
東京工業大学 科学技術創成研究院 バイオインタフェース研究ユニットの小池康晴教授、吉村奈津江准教授、ルドビコ・ミナチ特任准教授(兼ポーランド科学アカデミー研究員)、マッティア・フラスカ研究員(兼カターニャ大学)らの研究チームは、アリやゴキブリのように複雑な脚部を持つロボットに階層制御装置アーキテクチャー[用語1]を採用した新しい駆動方式を開発した。
この制御装置は非線形振動子[用語2]を基盤とし、システムの柔軟性を図るため、フィールド・プログラマブル・アナログ・アレイ(FPAA)[用語3]を実装している。ごく限られた数のハイパー・パラメーター[用語4]を入力することによって、ロボットの歩行パターンをさまざまに変えることが可能になった。具体的にはヒトにも昆虫にもある中枢パターン生成器(CPG)[用語5]を応用して自在に動くロボットの制御に成功した。
この成果は複雑構造のロボットを制御するために、人の脳波などの信号によってロボットを動作させるブレイン・コンピューター・インターフェース(BCI)[用語6]を将来どのように製作し使用できるかという研究の糸口として期待される。
研究成果は米国電子電気学会(IEEE)のオープンアクセスジャーナルである「IEEE Access」に1月26日に掲載された。
東工大の小池教授らの研究チームは、生物の脳に着想を得た2階層構造を有する電子発振器の階層ネットワークに基づいて、新たな歩行パターン生成手法を導入し、アリのような動きをする六脚ロボットの制御に応用した。この制御装置は二つの階層で構成されている。上の階層には中枢パターン生成器(CPG)を一つ搭載し、これでロボットの脚部全体の一連の動作を制御する。下の階層には6本の足に応じた6個の局所パターン生成器(LPG)[用語7]が搭載されており、各脚部の軌道を個別に制御している。
今回、小池教授らが開発した制御装置はシステムの柔軟性を重視してFPAAを実装しているのが特徴だ。きわめて自由度が高く、全回路パラメーターを即座に再設定およびチューニングできる。単純な配線構造であっても、生物の脳に見られる現象が再現可能であるということを実証した。現実に同研究グループが意図も予測もしていなかった現象および歩容をロボットが示し、後にそれが実際の昆虫にも見られることがわかった。
アナログな構成要素によってネットワークを実現し、それによってある程度の自己組織化がかなうために、こうした新たな現象が発生するが、この手法は、すべてが事前に設計および固定されている従来のエンジニアリングとはまったく異なる。この新たな手法によって、実際の生物の動きにより一層近づくことに成功した。
LPGは6本の足にそれぞれ三つの関節ごとに一つずつ非線形振動子が取り付けられている。つまり足の部分には18の振動子がある。それらを一つずつ制御していては大変なので2階層にして上層のCPGが少ないパラメーターで全体の動きを制御し、下層のLPGが各脚部を個別に制御する方式である。
昆虫はさまざまな要因に対して歩行パターン、特に、歩行速度を即座に調整している。一部の歩行パターンが頻繁に観察されたために、これらが基準の歩行パターンであると考えられているが、実際には無数の歩行パターンがある。そして、アリやゴキブリなど異なる種の昆虫が、異なる体形であるにもかかわらず、よく似た歩行パターンをとることがある。これまでは、これほどの複雑性を人工的なパターン生成器にすべて集約しようとしたので、自然な動きを持つ歩行ロボットを実現することができなかった。
昆虫に限らず、多くの動物は傾斜面や瓦礫の山などの不規則面の歩行が可能で、車両型ロボットでは、いくら最先端のものであっても立ち入ることができない場所に入ることができる。ここで興味をそそられるのは、動物の歩行時に行われている非常に複雑な計算は、実際にはどのようにして絶え間なく処理されているのかということである。
最も単純な構造の脳でさえも、歩行パターンの生成に特化したパターン生成器の回路を内蔵しているということがわかっている。これまでも、この回路の人工的な複製が試みられ、ある程度の成功を収めてきたが、十分な適応性を再現できないという問題にも直面した。
その一方で今回、2階層構造を有する電子発振器の階層ネットワークに基づいた、新たな歩行パターン生成手法を導入し、アリ型六脚ロボットの制御に応用することに成功した。この研究成果により、脚型ロボットの制御への新たな道が開かれた。
今回開発した制御方法の重要な点は、非常に複雑なものを、ごく少数のパラメーターにまとめられるということである。具体的にはハイパー・パラメーターにより、歩く動作、速度、姿勢などを明確に設定できることだ。パラメーターはダイナミックに変更可能であり、将来はBCIを使用してリアルタイムにパラメーターを変更することが容易になり、現在の手法では制御しきれない複雑な動作を制御できるようになると期待される。
また、この制御装置は徐々に効果を発揮し、生物学的に妥当と思われるパターン生成手法を実現していくことになるだろう。個別のコマンドをデコードする従来の煩雑なシステムと比べると、よりシームレスで本物そっくりに動かすことができるようになると考えられる。この分野において蓄積した多くのノウハウを使って今後さらに実用化に向けた研究を進めていく。
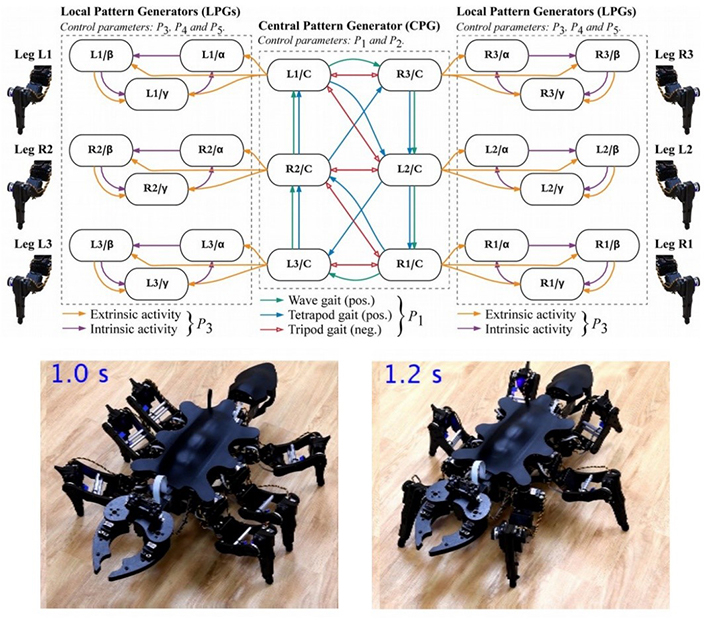
図1.制御装置のネットワークとロボットの姿勢
上:制御装置の構成。中央に中枢パターン生成器(歩容全体を制御)、左右に6個の局所パターン生成器(各脚部の軌道を個別に制御)を示しています。
下:アリのような姿勢(左)およびゴキブリのような姿勢(右)で歩行するロボットの静止イメージ。
この研究は、World Research Hub Initiative(WRHI)[用語8]のプログラムにより、東京工業大学、ポーランドのポーランド科学アカデミー、およびイタリアのカターニャ大学の研究者が共同で取り組んだ成果である。
用語説明
[用語1] 階層制御装置アーキテクチャー : アーキテクチャーは設計方法、設計思想のこと。階層制御はこの研究の場合、2階層にして上の階層でロボットの脚部全体の制御、下の階層には6本の脚部の軌道を制御している。
[用語2] 非線形振動子 : 一般に微分方程式のかたちで表す動的な振る舞いで、初期値に比例しない振動を発生するもの。
[用語3] フィールド・プログラマブル・アナログ・アレイ(FPAA) : プログラム可能なアナログ回路が多数結合したもの
[用語4] ハイパー・パラメーター : モデルの構造を決めるためのパラメーター
[用語5] 中枢パターン生成器(CPG) : 刺激を加えて手足の規則的な運動パタ ーンを生成するリズム発生器のようなもの。規則的なリズムの歩容(脚部動作シーケンス)を自動生成する。タイトルの「バイオインターフェース」はこのCPGの働きを活用しているという意味。
[用語6] ブレイン・コンピューター・インターフェース(BCI) : 脳波など人間の脳が発信する信号によってロボットの動作を制御すること。
[用語7] 局所パターン生成器(LPG) : CPGの各出力を、対応する脚部ジョイントの軌道に変換する装置。
[用語8] World Research Hub Initiative(WRHI) : 海外から世界トップレベルの研究者を招聘し、東工大の研究者と共同して研究を行い、分野を超えた交流を実施するプログラム。
論文情報
掲載誌 : |
IEEE Access |
論文タイトル : |
Versatile locomotion control of a hexapod robot using a hierarchical network of nonlinear oscillator circuits |
著者 : |
Ludovico Minati1、2、 Mattia Frasca3、 Natsue Yoshimura1、Yasuharu Koike1 1東京工業大学(日本)2ポーランド科学アカデミー(ポーランド、クラクフ)3カターニャ大学(イタリア) |
DOI : |
研究内容に関するお問い合わせ
東京工業大学 科学技術創成研究院
バイオインタフェース研究ユニット
教授 小池康晴
E-mail : koike@pi.titech.ac.jp
Tel : 045-924-5054
取材申し込み先
東京工業大学 広報・社会連携本部 広報・地域連携部門
E-mail : media@jim.titech.ac.jp
Tel : 03-5734-2975