東工大ニュース
東工大ニュース
![]()

東工大の2チームが、米国で開催された超小型人工衛星の大気圏内打ち上げ実証実験(ARLISS(アーリス)、以下ARLISS)のミッション コンペティション部門に参加し、ベスト ミッション アワードでそれぞれ1位、2位を獲得しました。また、うち1チームは、全部門を通して選ばれるオーバーオール アワードにおいて2位を受賞しました。
ARLISSは、各国の大学生が設計・製作した350グラム缶サイズまたはその3倍の1050グラムの缶サイズの「CanSat(カンサット)、以下CanSat」と呼ばれる超小型人工衛星模擬モデルを、ロケット愛好団体AeroPAC(エアロパック)の協力により高度4,000メートルに打ち上げ、飛行中または着地後に課されるさまざまなミッションに対する成果を競う世界大会で、今年で20周年を迎えました。今大会は、9月10日~13日にかけて米国ネバダ州 ブラックロック砂漠において行われ、事前審査をクリアした計25チーム(日本 15チーム、メキシコ 4チーム、米国 2チーム、韓国 1チーム、インド 1チーム、ペルー 1チーム、コスタリカ 1チーム)が参加しました。
ロケットから放出されたCanSatが、予め設定された目標地点に向かって完全自律的に移動し、その目標地点にどこまで近づけるかを競う「カムバック コンペティション」部門と、CanSatが自律制御によって行うミッションのアイデア性や達成度を参加者が評価し、総合点数を競う「ミッション コンペティション」部門に分かれて競いました。
工学部 機械宇宙学科の林輝明さん(学士課程4年)を代表とする学部・大学院生5名による混成チーム「Rosette(ロゼット)」と、工学院 機械系の小林寛之さん(学士課程3年)を代表とする学士課程10名によるチーム「RASTICAS(ラスティカス)」が、授業「宇宙工学実践プロジェクト」「宇宙システムプロジェクト」で学修したことをベースに超小型人工衛星模擬モデルであるCanSatを設計・制作しました。

気球試験の全体集合写真
(Rossete、RASTICAS、松永三郎教授、ティーチング アシスタント)

朝食ミーティング後の全体集合写真
(Rossete、RASTICAS、中西洋喜准教授)
今回は2回目の参加になりますが、前回のリベンジを果たすことができ、大変うれしく思っています。松永研究室では可変形状機能を用いた宇宙システムの新しい姿勢制御方式を研究しており、その一環として、私たちのミッションを「可変形状により発生する空力トルク※を用いた高精度姿勢制御による定方向観測」と設定しました。このミッションでは、パラシュートでの降下時にパドルを動かすことによってカメラの方向を制御し、定められた方向を観測することを目標としています。授業では、毎週の進捗報告会や審査会を行い、実際の衛星開発と同じ流れで進めていきます。私たちは、初めに行うミッション決めで時間がかかってしまい、開発期間が短く、開発はロケット打ち上げの直前までやっていました。ミッションが無事成功したのは、メンバーの多大な労力と先生やティーチング アシスタント(TA)の菊谷侑平さん、恒光翼さんをはじめとするプロジェクト関係者の協力のおかげだと思っています。この授業で得た貴重な経験を、今後の衛星開発に生かしていきたいです。
※トルク…ある固定された回転軸を中心にはたらく、回転軸のまわりの力のモーメントのこと。
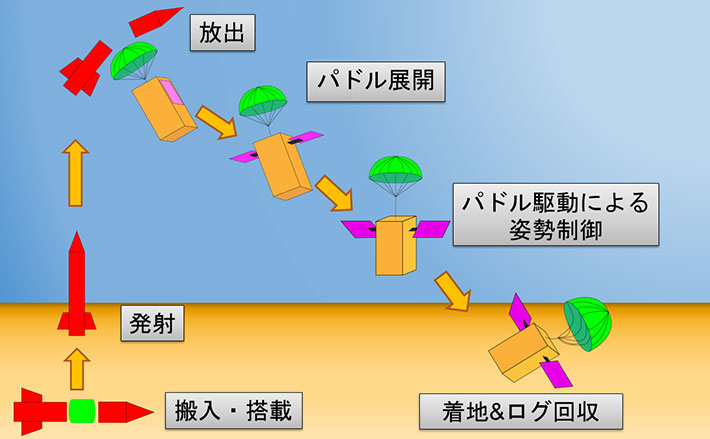
ミッションのイメージ図
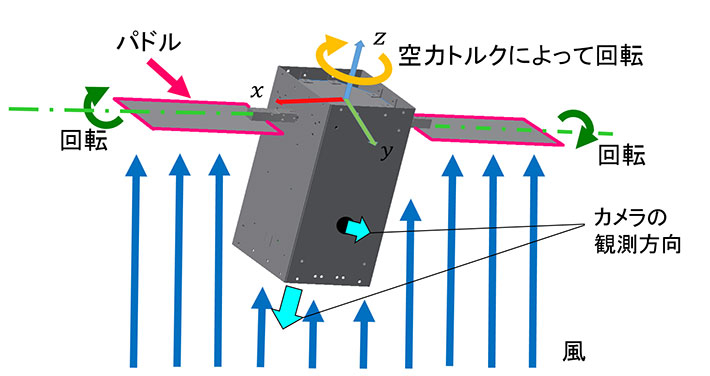
ミッションの補足説明図

大会中のロケット運搬
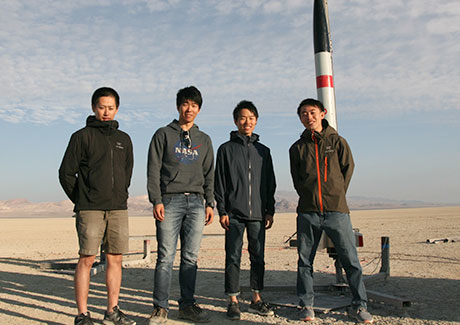
ロケット打ち上げ前
メインである高精度姿勢制御には大変苦労しました。大気抵抗によるトルクが小さすぎると機体が動かず、逆に大きすぎるといつまでも収束しない、というジレンマに苦しみました。そこで、回転を止める制御モード(角速度制御)と徐々に目標方向へ移行する制御モード(角度制御)を用意することで、問題は2つに切り分けられ、それぞれに特化したアプローチを取ることが出来ました。また、機体とパラシュート間の回転部の摩擦を最大限まで少なくすることで、小さい大気抵抗での姿勢の微調整を可能にしました。本番では、意図的に与えた高速回転を止めることや、目標方向を観測し続けることに成功しました。その様子は、以下の動画で見ることができます。(高速回転停止、定方向観測)
ロケット打ち上げ
CanSat放出時
降下時底面カメラ
高速回転停止
定方向観測

機体外観

ベスト ミッション アワード 1位の盾(チームRossete)
ベスト ミッション アワード 2位
私たちは、松永三郎先生・中西洋喜先生のご指導のもと、ミッションの決定からCanSatの設計・製作・試験・打ち上げ実験・解析までを行いました。これらを実際に体験することで、実際の宇宙開発方法やプロジェクトマネジメントを体系的に学ぶことができました。
土星最大の衛星「タイタン」での将来的な生命探査におけるサンプルリターンを想定し、「CanSatによる土壌サンプルの採取と搭載ドローンによる運搬技術の検証」をミッションとしました。ARLISSではCanSatによって砂漠の土を採取し、その土をCanSat内部に搭載しているドローンへ受け渡し、運搬するという実験を行いました。
先生方やティーチング アシスタント(TA)の菊谷侑平さん、恒光翼さんをはじめとする先輩方からアドバイスをいただきながら製作を進めることで知識を深めたり、チーム一丸となってミッションへ挑戦したりしたことには、座学では学べないことが多く、とても貴重な経験になりました。最終的には、賞をいただくことができ、本当に嬉しく思います。
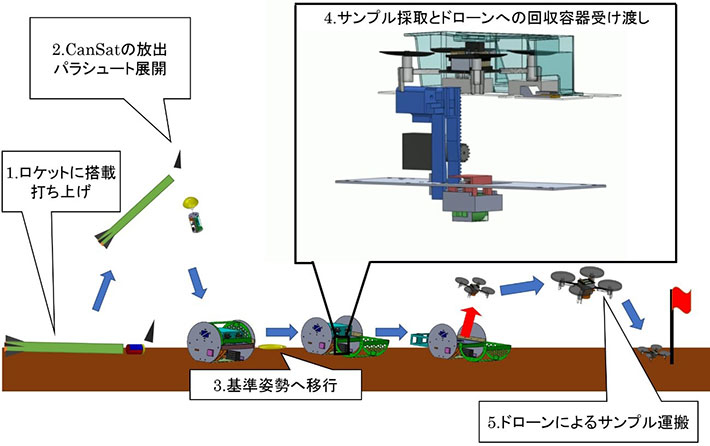
ミッションのイメージ図

現地作業風景

射点にて
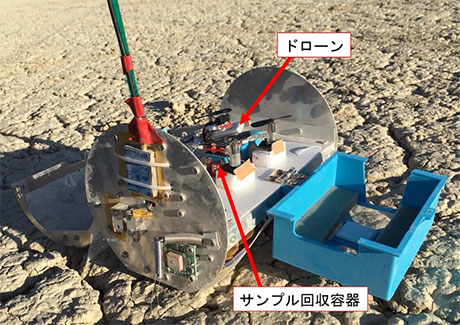
機体外観
CanSat内にあるサンプル回収機構によって、粘着剤を用いたサンプル採取を行います。その後、ドローンにサンプルが入った容器を受け渡し、CanSat機体からドローンが飛び立つことで運搬をします。
サブシステム・コンポーネントごとに担当を分けてCanSatの製作を行ったのですが、それらを統合する際に不具合がたくさん起き、原因を見つけて修正・改善をしていく作業が非常に苦労しました。また、現地で起きた動作不良などのトラブルに対処していくのは大変でした。
打上実験1回目の結果:ドローン離陸
打上実験後の追加実験:ドローン離陸
人工衛星モデル(CanSat)を設計・製作し、気球投下試験を行います。厳しい制約条件、激烈な打ち上げ環境に耐え、ミニマムサクセスを必ず達成するためのシステム工学およびプロジェクトマネジメントの方法を習得することを目標とする授業です。「宇宙工学実践プロジェクト」は主に修士課程学生向け、「宇宙システムプロジェクト」は学士課程学生向けであり、それぞれ10人程度を定員としています。