東工大ニュース
東工大ニュース
![]()
公開日:2020.11.04
東京工業大学 工学院 システム制御系の石崎孝幸准教授と井村順一教授は、スウェーデン王立工科大学の笹原帆平研究員、慶應義塾大学の井上正樹専任講師、群馬大学の川口貴弘助教との共同研究で、多数の自律分散的な主体(設計者・開発者・管理者)がシステム全体の不安定化を危惧せず制御アルゴリズム[用語1]の組み込みや更新を繰り返していくための数学的な基本原理を発見した。
エネルギーインフラなどの巨大なシステムの設計開発では、システム全体の機能や構成を事前に計画するウォーターフォール開発[用語2]は現実的ではない。特に近年は社会情勢などの環境変化に応じて柔軟で迅速な技術開発のため、小単位で設計と実装のサイクルを繰り返すアジャイル開発[用語3]の重要性が増している。
アジャイル開発はソフトウェア工学で数多くの実績がある。しかし、制御工学ではモジュール単位に分割して制御アルゴリズムの設計開発を行うことは容易ではない。その理由は、制御工学では主に、時間に関する微分方程式により物理法則が記述されるシステム(動的システム)を対象とすることにある。
一般に、動的システムの挙動は、現在だけでなく過去の制御動作にも影響されるため、仮に各々のモジュール(サブシステム)に対して良好に動作する制御アルゴリズムを設計したとしても、それらの動的な相互干渉を適切に考慮しなければ、システム全体は容易に不安定化してしまう。例えば、電力システムの不安定化は大規模な停電に直結するため、制御アルゴリズムの調整には細心の注意を払う必要があった。
こうした不安定化を危惧せずに、複数の主体が自律分散的に制御アルゴリズムの組み込みや更新を行うことを可能にした。同時にシステム全体の安定維持のために不可欠な制御原理を数学的に特徴づけることにも成功した。
本研究成果は2020年11月3日(現地時間)に米国電気電子学会誌「IEEE Transactions on Automatic Control」のオンライン速報版で公開された。
モジュラデザイン[用語4]はソフトウェア工学では古くから馴染みのある概念である。システム全体を機能ごとにモジュール化して複数の開発者により並行分業することにより、巨大なソフトウェアを効率的に構築することが可能となる。また、システムの機能を部分的に調整する場合にはモジュール単位でアップデートを行うことができるため、システムの拡張性を高めることにも寄与する。
特に近年では社会情勢などが目まぐるしく変化していく中で、環境の変化に応じて柔軟で迅速な技術開発を行うために、小単位で設計と実装のサイクルを繰り返していくアジャイル開発の重要性が増している。アジャイル開発では環境の変化に適応する進化的な設計を目指しており、システム全体の機能や構成を計画的に設計するウォーターフォール開発としばしば対比されてきた。
アジャイル開発はソフトウェア工学では数多くの実績がある。一方で、制御工学において同様の開発方法を応用することは容易ではなかった。その理由は、制御工学では主に、時間に関する微分方程式により物理法則が記述されるシステム(動的システム)を対象とすることにある。一般に、動的システムの挙動は、現在だけでなく過去の制御動作にも影響される。したがって、仮に各々のモジュール(サブシステム)に対して良好に動作する制御アルゴリズムを設計したとしても、それらの動的な相互干渉を適切に考慮しなければ、システム全体は容易に不安定化してしまう。
実際に、図1に示される電力系統モデル(IEEE68バスモデル[用語5])に対して、複数の開発者が同時並行的に制御アルゴリズムの設計と実装を行った場合のシミュレーションを行ってみた。このシミュレーションでは1台の発電機に対して1人の制御アルゴリズムの開発者が割り当てられており、各々の開発者は自身が担当する発電機の数理モデルのみを制御アルゴリズムの設計に利用できることを想定している。
すなわち、各発電機がモジュールであり、各開発者による制御アルゴリズムの設計はモジュール単位でのアップデートに相当している。なお、制御アルゴリズムの設計には、制御工学で標準的な線形2次レギュレータ[用語6]による最適制御手法を用いた。
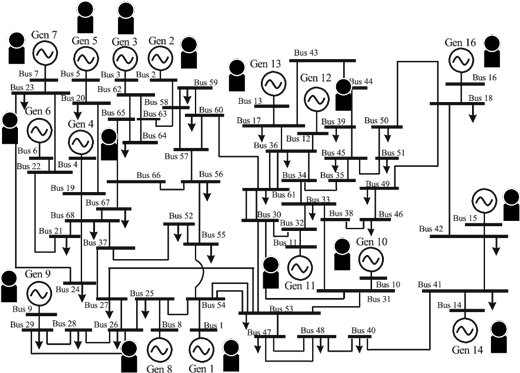
図1. IEEE68バスモデル。16台の発電機(丸印)、35個の電力消費要素(矢印)、68箇所のバス(棒印)により構成される。1台の発電機に1人の制御アルゴリズムの開発者が割り当てられている状況を想定している。
シミュレーション結果を以下に示す。図2では、各開発者によって設計された制御アルゴリズムの発電機(モジュール)単位での制御性能を評価しており、制御を行わない場合(黒の棒グラフ)と比べて、制御を行う場合(青の棒グラフ)の性能が向上していることがわかる。
また、より強固な制御を行う場合(赤の棒グラフ)には、少なくとも発電機単位では、さらに制御性能を高めることができる。しかしながら、これらの制御アルゴリズムを電力系統モデルに実装すると、安定度が向上するどころか、システム全体が不安定化することが図3からわかる。この結果が示すように、動的システムに対して自律分散的に制御アルゴリズムの組み込みや更新を行うことは容易ではない。
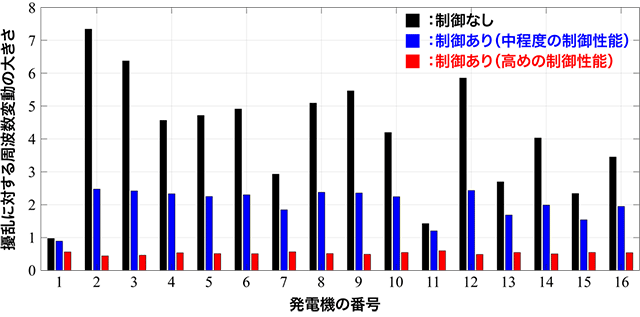
図2. 発電機単位で設計された制御アルゴリズムの性能。棒グラフは発電機の内部状態への擾乱に対する周波数変動の大きさを表しており、値が小さいほど制御性能が高いことを表す。許容可能な制御入力の大きさを変えることで、制御アルゴリズムの性能を青と赤の2段階に設定した。
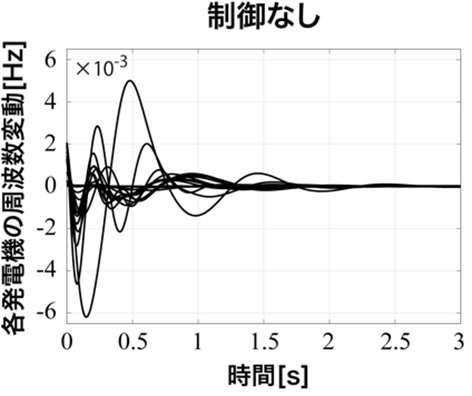
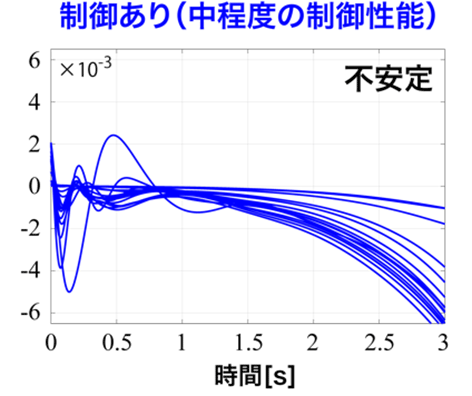
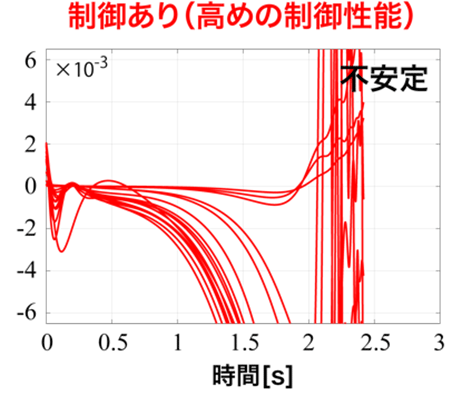
図3. 相互干渉を考慮せず局所最適制御を適用した場合の発電機周波数の時間変動。電力系統に対する擾乱として、バス1に地絡(ちらく)[用語7]を生じさせている。制御を行わない場合(左図)には周波数変動の大きなピークが生じているが、時間が経過すると周波数変動は0に漸近する。制御を行った場合(中図、右図)には、地絡直後の周波数変動のピークが小さくなっているが、時間が経過すると周波数が発散している。
本研究では多数の自律分散的な主体が、上記のようなシステム全体の不安定化を危惧することなく、制御アルゴリズムの組み込みや更新を繰り返していくための、数学的な基本原理を発見した。具体的には、石崎准教授らを中心にして2014年頃から研究が進められてきたレトロフィット制御[用語8]と呼ばれるプラグイン型の分散制御手法が、複数の主体が自由な意思決定のもとでモジュール単位の制御を行う場合に、システム全体が不安定化しないための唯一の方策であることを数学的に証明することに成功した。本研究により、エネルギーインフラに代表される巨大なシステムを進化的に設計するために不可欠な制御原理が明らかになったといえる。
図1の電力系統モデルにレトロフィット制御を適用した場合のシミュレーション結果を図4に示す。図2で設計された制御アルゴリズムに、出力整流器と呼ばれる特別なアルゴリズムを追加することで、レトロフィット制御のアルゴリズムを構成することができる。図3とは異なり、図4では発電機(モジュール)単位の制御性能を高めることによって、電力系統全体の安定度が適切に向上していることがわかる。
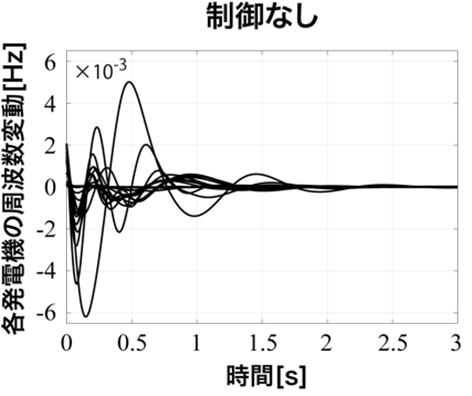
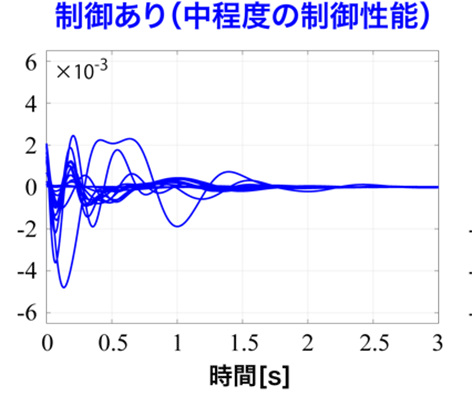
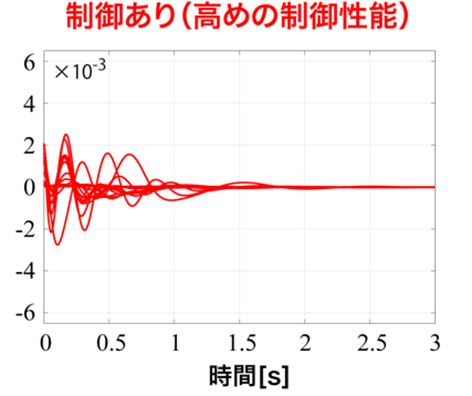
図4. レトロフィット制御を適用した場合の発電機周波数の時間変動。擾乱などは図3と同様に設定している。発電機単位での制御性能を高めることによって、電力系統全体を不安定化させることなく、周波数変動を効果的に低減できている。
レトロフィット制御には機械学習[用語9]のアルゴリズムを組み込むこともできる。具体的には、モジュール単位でシステムの運用データを収集して、より良い制御アルゴリズムを機械的に学習することが可能である。特に、収集されたデータの質や量が十分でなかったとしても、システム全体を不安定化させることはないという特長をもつ。
近年では、エネルギービッグデータという言葉も現れており、エネルギーインフラにおいて、スマートメーターなどを用いて様々なデータを収集することが可能となってきた。同時に、このようなデータから有意な情報を学習してエネルギーマネジメントに有効活用することが求められている。しかしながら、目的に対して必要とされるデータの質や量を事前に見積もることは一般に難しいため、収集されたデータによっては望み通りの結果が得られない場合がある。最悪の場合にはシステムを不安定化させてしまう可能性もある。
レトロフィット制御と機械学習を組み合わせれば、データの信頼度によらずシステムを安定に維持しながら、データを充実させることで、より高い制御性能を実現することができる。今後は制御工学の観点で必要不可欠なデータの特徴を明らかにし、エネルギーインフラのスマート化への貢献を目指す。
用語説明
[用語1] 制御アルゴリズム : センサで計測した制御対象の情報に基づいて適切な制御動作を決定する計算アルゴリズム。例えば、電力系統の制御では、周波数偏差や電流、電圧などをセンサで計測し、発電機から供給される電力などを調整する。
[用語2] ウォーターフォール開発 : システム全体の仕様を事前に計画する開発手法。開発スケジュールや予算を把握しやすいことなどが利点だが、開発途中での仕様変更が難しいことや製品化までに時間がかかることが不利な点となる。
[用語3] アジャイル開発 : 小単位に分割してシステムの設計と製品化を繰り返していく開発手法。状況に応じて柔軟に仕様変更が可能なことなどが利点だが、開発予算の見積もりが難しいことなどが欠点となる。
[用語4] モジュラデザイン : 製品の設計プロセスを分散化するための設計概念。製品をモジュール化するだけでなく、各々のモジュールの設計自体を各々の開発者の意思決定により自立分散的に行う。Modularity-in-designとも呼ばれる。
[用語5] IEEE68バスモデル : 電力工学分野で標準的に用いられる電力系統モデル。米国のニューイングランドとニューヨークの連系系統を模擬している。
[用語6] 線形2次レギュレータ : 線形微分方程式系で記述される動的システムに対する最適制御手法の一つ。システムの内部状態と制御入力の2次関数コストの和を最小化する。発電機モデルは非線形であるため、近似線形化を介して制御アルゴリズムを設計する。英名はLinear Quadratic Regulator (LQR)。
[用語7] 地絡 : 機器と大地の間に大きな電流が流れる現象。落雷などによる事故電流を検出して遮断器が動作するまでに0.1秒程度が必要であり、その間に周辺の発電機に大きな周波数変動が生じる。
[用語8] レトロフィット制御 : 分散制御システムのモジュラデザイン手法の一つ。本制御手法の応用により、風力発電などの再生可能エネルギー連系系統に対してプラグイン型の制御技術も開発されている。
[用語9] 機械学習 : 大量のデータから特徴的なパターンを見つけ出すための計算アルゴリズムの一つ。予測や分類などの処理を行う。人工知能(AI)の主要な要素技術となっている。
論文情報
掲載誌 : |
IEEE Transactions on Automatic Control |
論文タイトル : |
Modularity-in-Design of Dynamical Network Systems: Retrofit Control Approach |
著者 : |
Takayuki Ishizaki, Hampei Sasahara, Masaki Inoue, Takahiro Kawaguchi, Jun-ichi Imura |
DOI : |
お問い合わせ先
東京工業大学 工学院 システム制御系
准教授 石崎孝幸
E-mail : ishizaki@sc.e.titech.ac.jp
Tel / Fax : 03-5734-3179
取材申し込み先
東京工業大学 総務部 広報課
E-mail : media@jim.titech.ac.jp
Tel : 03-5734-2975 / Fax : 03-5734-3661