Fifty-four students from universities in China, India, Japan, Mexico, Singapore, South Korea, Thailand, and the United States gathered for the 2018 Robocon International Design Contest (IDC), held at Tokyo Tech from August 6 to 18.

President Kazuya Masu's welcome address
IDC, held annually since 1990 to foster and develop creativity, technique, and international experience among young future engineers, rotates to a different location every year. The competition does not place countries or institutions against one another, but instead mixes teams of international students who work together to design and build remotely controlled robots.
After a welcome address by Tokyo Tech President Kazuya Masu, participants from the following institutions formed 11 teams and covered the rules of this year's contest.
Massachusetts Institute of Technology (MIT) |
3 participants |
National Polytechnic Institute |
6 participants |
Tokyo Denki University |
6 participants |
Seoul National University |
4 participants |
Tsinghua University |
4 participants |
Shanghai Jiao Tong University |
5 participants |
Zhejiang University |
4 participants |
Singapore University of Technology and Design |
8 participants |
Amrita Vishwa Vidyapeetham |
4 participants |
Tokyo Tech |
6 participants |
Universities in Thailand |
4 participants |
The World Star Hunting Swallow
This year's competition, called The World Star Hunting Swallow, involved the use of two robots — a sky robot and a land robot, each of which started in their own areas. The playing field consisted of a land area, sky area, insect pool containing balls, wasteland, collection box, and a sky lift. The slopes in the center of the field, which were hampered by pins, included three swallow's nests where teams tried to place the balls.
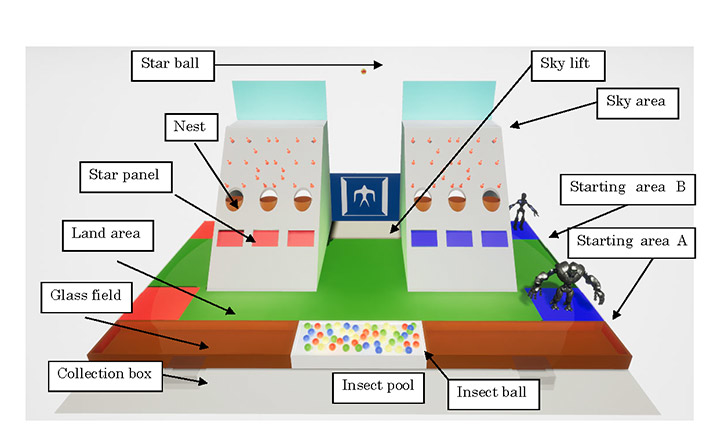
The playing field
Placing a ball in the collection box earned teams one point. Balls inserted in the right and left swallow's nests were each worth 10 points, while a ball in the center nest earned teams 30 points. Collecting the star ball from the center of the sky area and placing it in the collection box added 10 more points and doubled the total. A ball in each swallow's nest and the star ball in the collection box automatically resulted in victory.
The sky lift in the center of the playing field began ascending 45 seconds after each round began, and stopped as it reached the sky area. This allowed one of the robots to move to a better position if it moved swiftly enough. The maximum combined weight for both robots was 10 kg, and each had to fit into a starting box of 50 cm3. For the first 30 seconds, the first robot could only be controlled by a computer or another robot.
Competitors were allowed to create up to two robots with the materials provided in their starter kits and an additional 2,000 yen. Each round of the contest was 120 seconds long.
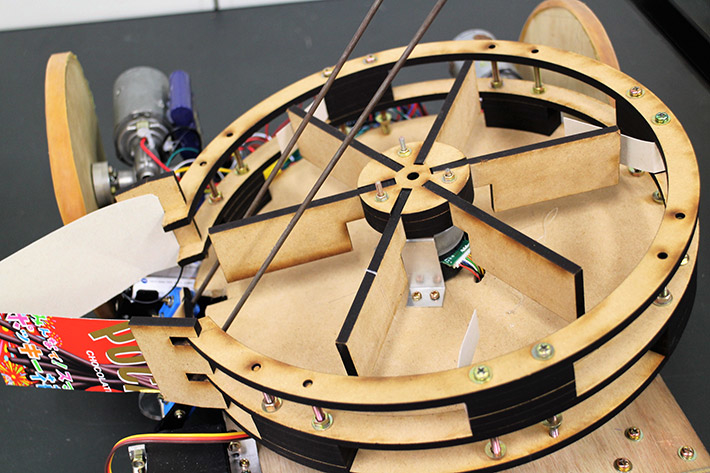
One of this year's creations holds up to six balls in center, which are moved to nests using two rails
Ten days to present and improve ideas
On the second day of the contest, each team presented their ideas in front of instructors, who gave feedback on how to improve their creations. At this stage, teams were mainly focused on devising a strategy that would allow them to get their robot to the sky lift before it ascended, and on creating various mechanisms that would allow them to move the sky area ball to a swallow's nest.
Idea presentation stage
In addition to robot design and teambuilding, experiencing different cultures is an important part of IDC. Despite only having ten days for the whole competition, participants managed to take a break from their busy schedule to go sightseeing at some of Tokyo's popular spots midway through the program.

Sightseeing together in Tokyo
Competition day
On the final day, participants gathered on Ookayama Campus to compete in front of an excited audience, many of whom were elementary school students and their guardians. Many teams struggled to navigate the narrow paths of the playing field, getting stuck on the slope and not making it to the sky lift before it departed. Most of the robots that managed to reach the sky area successfully placed balls into the nests.
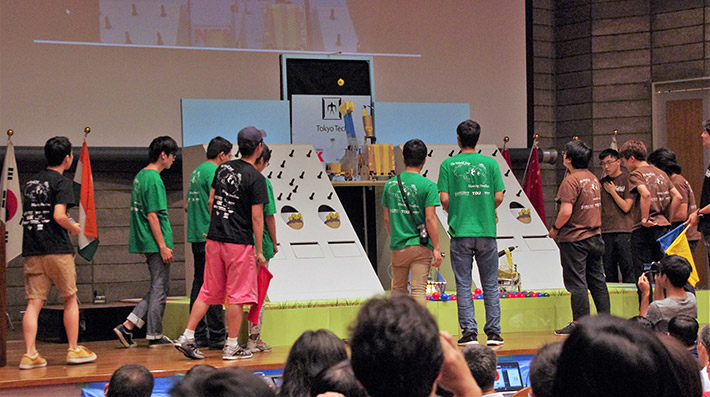
Reaching for the star ball above the sky lift
In the final round, the pink team, who demonstrated high reliability throughout the competition, emerged victorious. While their mechanism was simple, it was highly efficient in avoiding the pins blocking the three swallow's nests.
After the competition ended, elementary school students in the audience – potential future IDC participants — were given the chance to test out the winning team's robot.

Action during the finals

Elementary school students testing out robots

EVP and Provost Isao Satoh (left) congratulating winners

Second place team celebrating

Winners of Sponsors' Award

Winners of Best Idea Award
As in previous years, IDC ended with a party where students from around the world put on performances representing their cultures. After an official kagami-wari — a traditional Japanese opening of a sake cask — visiting students and instructors put on a spectacular Latin dance performance. All teams came together in a bon-odori dance to close the event.
The 2018 IDC was supported by the Tokyo Tech Fund. The next IDCs will be held at MIT in 2019 and at Tsinghua University in 2020.

Bon-odori dance at farewell party





