Members of the Aqua Lab from the Society for the Study of Robotics — an official Tokyo Tech student club — have finished third at the 8th Underwater Robotics Competition in Okinawa. The contest was held in Ginowan City, Okinawa Prefecture on November 19 and 20, 2022. Team Tokyo Tech competed in the Remotely Operated Vehicle (ROV) Division of the competition with their robot Kurione2.
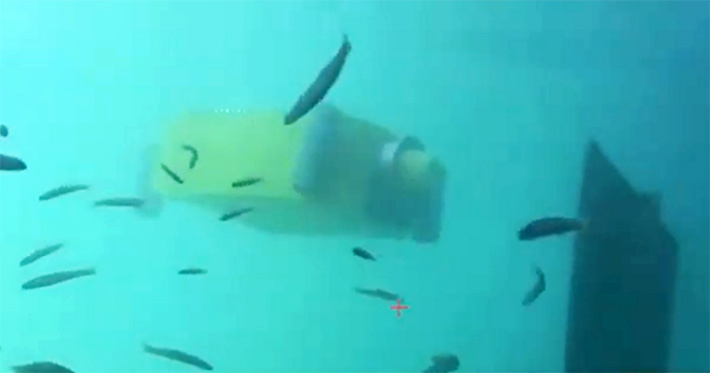
Kurione2 conducting search in seawater
The Underwater Robotics Competition in Okinawa is one of the few robotics contests in the world that actually takes place in the sea. In the ROV Normal Task Division, which is inspired by undersea exploration, teams must score points by reading characters or QR codes placed on targets underwater with the camera mounted on their robot.

Participants at Ginowan Fishing Port
Maintaining a visual of these targets in the sea can be challenging due to waves, and a vehicle that is subject to increased water resistance may be swept away. The letters, numbers, and QR codes that need to be read are small, so the robot must be maneuvered left and right, forwards and backwards, but also up and down carefully. The best way to achieve this is to use many power units called thrusters, which help move the vehicle laterally. Too many thrusters will create a robot shape that succumbs to water resistance. The Aqua Lab's Kurione2 is arranged so that its azimuth thrusters, which can change thrust direction, form an inverted triangle. This allows the robot to move left and right, back and forth, and up and down while achieving a streamlined shape that is less susceptible to water resistance.

Variable thrust mechanism of azimuth thrusters

Thrusters arranged in inverted triangle
In additional to the ocean waves, the angle of the sun, wind, and other natural factors, visibility was also a major issue in this seawater environment. While many teams were able to score well in the morning session, the water became muddier in the afternoon and many teams were unable to read the targets.

Aqua Lab members presenting their robot on land
Despite these challenges, Aqua Lab's members took advantage of their outstanding vehicle performance and succeeded in reading all three of the targets that they reached. As a result, they finished third overall out of 13 teams, offering the best presentation of their efforts and placing third in the actual competition.
Comments from Aqua Lab members
Takamaru Saito
2nd-year master's student, Mechanical Engineering
The waterproof container that holds the battery and circuits of the robot was fabricated using the aluminum brazing technique by Yusuke Mizukami, a 4th-year Earth and Planetary Sciences student. This greatly improved the waterproofing and heat dissipation functions of Kurione2 and decreased the time required to open the container, all of which were issues during the 2021 competition. During the adjustments made on the first day of the competition, we had problems with the cables, which we did not experience in freshwater. We could really feel the challenges of the ocean environment. Although we had limited time to practice in seawater, we were able to work together, identify the problem areas in time, and make repairs after the practice session, which allowed us to operate the robot smoothly during the actual competition. It was once again a great reminder of the importance of preparing for problems in advance.
Tetsuro Obu
2nd-year master's student, Systems and Control Engineering
I was in charge of piloting Kurione2. I have competed in past competitions as both a pilot and a builder, but this time, the robot really was in tip-top condition. This was not simply because of our improved manufacturing skills, but also due to our increased experience in transporting the robot to the venue and operating it on site. Many thanks to Keisuke Uchikawa, a 4th-year Computer Science student who continued to develop the user interface even during our trip to the contest. As a result, we were able to demonstrate the robot's full potential even when controlling it using the footage from the two mounted cameras. This competition was a great opportunity to confirm the robot's actual operation in an ocean environment while clarifying our future goals regarding the autonomy of the robot.
Yuki Origane
1st-year doctoral student, Systems and Control Engineering
The research field in which I specialize has little to do with underwater robotics, but I have been able to apply the knowledge gained from my research and lectures to robot creation, and vice versa. In the future, I hope to be able to use the robots we have created in actual underwater investigations.

(from left) 3rd-year Systems and Control Engineering student Yo Toyomoto, Obu, Saito, Uchikawa, and Origane with their robot Kurione2





