東工大ニュース
東工大ニュース
![]()
東京工業大学公認の学生サークル、ロボット技術研究会の水中ロボットチーム、アクア研が11月19日~20日にかけて沖縄県宜野湾市で開催された「第8回沖縄海洋ロボットコンペティション」ROV※ノーマルタスク部門に出場し、総合3位の敢闘賞を受賞しました。
ROV:遠隔操作型の無人潜水機(英語:Remotely Operated Vehicle)

ロボット技術研究会のメンバーとKurione2(右から、折金さん、内河さん、斎藤さん、大部さん、工学院 システム制御系 学士課程3年の樋本耀さん)
沖縄海洋ロボットコンベンションは、世界的に見ても数少ない、実際に海中で行われるロボット競技会です。ROVノーマルタスク部門は海底探査をイメージしたもので、海中に設置された目標物をロボットに搭載したカメラで読み込み、書かれた数字やQRコードの内容を読み取ることで得点を得られます。

競技会場となった宜野湾新漁港
海中では波があるため、水の抵抗を大きく受ける機体は流されてしまい、目標物を視認し続けることが難しくなります。目標物の文字やQRコードは小さいため、前後左右と深さ方向にいかに細かく操縦できるかが重要になります。これを実現するために最も簡単な方法はスラスタ※をたくさんつけることです。一方、スラスタの数が多いと、どうしても水の抵抗を受けやすい形状となってしまい、海中で波に流され、目標物を視認し続けることが難しくなります。ロボット技術研究会の水中ロボット「Kurione(クリオネ)2」は、スラスタの推力方向(水を吹く方向)を変えることができるアジマススラスタが逆三角形を作るように配置されています。これにより、前後左右と深さ方向への移動を可能としつつ、水の抵抗を受けにくい流線型の形状を実現しました。
スラスタ:プロペラなどを用いた、船などを動かすための動力装置

アジマススラスタの推力可変機構
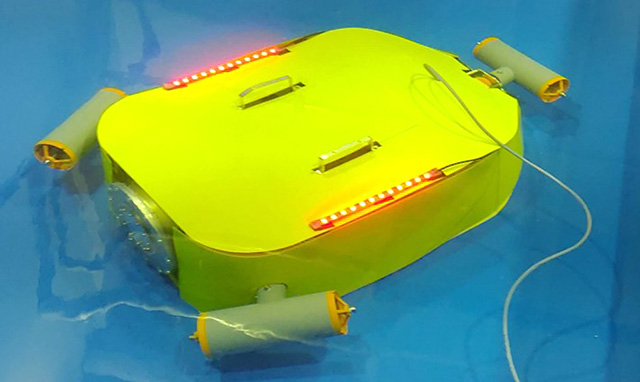
逆三角形に配置されたスラスタ
競技会本番では、この移動性能と水の抵抗を受けにくい形状の有効性を確認できる結果となりました。実際の海で行われる本大会は、屋内で行われるロボコンのようにフィールド環境が一定ではないという大きな特徴があります。太陽の傾き・潮の満ち引き・風等で目標物へのアプローチの難しさは時々刻々と変化します。
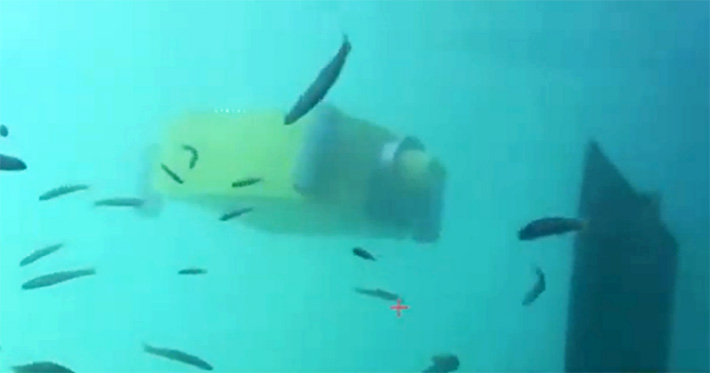
海中で探索を行うロボット技術研究会の機体Kurione 2

プレゼンを行うロボット技術研究会のメンバー
今回の競技会では、海中ゆえの水の透明度が大きな問題となりました。全チームが参加する予選の内、午前の1走目では順調に得点できるチームが多かった一方、午後の2走目では水が濁り、文字やQRコードを判読できないチームが相次ぎました。
しかしロボット技術研究会は上に述べたような機体性能を活かして、透明度が低くても目標物を視認できる距離まで接近し、かつ細かく位置を調整することで、到達した3か所の目標物を全て判読することに成功しました。
その結果、ロボット技術研究会は同じ部門に出場した全13チーム中、プレゼンテーション点1位と競技点3位で総合3位の敢闘賞を受賞しました。
斎藤天丸さん(工学院 機械系 修士課程2年)
バッテリーや回路を収める防水容器は水上勇佑さん(理学院 地球惑星科学系 学士課程4年)の導入したアルミのロウ付け技術で製作しました。これにより2021年度の課題であった防水・放熱性能や容器の開封にかかる時間が大幅に改善され、スムーズに競技を行うことができました。大会初日の調整には普段の淡水プール実験では発生していなかったケーブルトラブルが発生し、実際の海という環境の難しさを痛感しました。海水練習の時間は限られていましたが、チームのメンバーと協力して時間内に問題箇所を特定し、練習後に補修を行うことで大会本番では問題なく動作させることができました。事前にトラブルを想定して準備をしておくことの大切さを改めて認識しました。
大部徹郎さん(工学院 システム制御系 修士課程2年)
Kurione 2の操縦を担当しました。これまでの大会でも製作に加え操縦担当として参加してきましたが、特に今回の大会についてはロボットが万全の状態で競技に挑むことができました。これは単純に製作に関する技術力の向上だけでなく、会場への輸送や現地での運用などの経験を積み重ねて出来た成果でもあります。また、操縦に関しては、内河慶輔さん(情報理工学院 情報工学系 学士課程4年)が遠征中にも整えてくれた操縦用のUI(User Interface:ユーザーインターフェース)のおかげもあり、ロボットに搭載した2台のカメラからの映像を見ながら操縦しても、ロボットのポテンシャルを遺憾なく発揮できました。実際に海での動作を確認することができ、今後のロボットの自律化に向けて目標がさらに明確になった大会でした。
折金悠生さん(工学院 システム制御系 博士課程後期1年)
大学における研究分野は水中ロボットとはあまり関係のないものですが、研究や講義で得た知識をロボット製作に生かしたり、逆にロボット製作で得た経験が研究に生きたりすることもあります。今後は製作したロボットを実際の水中調査で使うことができたらよいと考えています。