東工大ニュース
東工大ニュース
![]()
東京工業大学の公認サークルであるロボット技術研究会が、12月11日に兵庫県神戸市で行われたTechno-Ocean2021 水中ロボット競技会に出場し、AUV(自律型水中ロボット)部門にて3位入賞を果たしました。
本競技会は海洋科学技術の国際シンポジウムTechno-Ocean2021のメインイベントの1つで、AUV部門、フリースタイル部門、ジュニア部門、海のアバター部門、夢の水中ロボットはがき絵コンテストの5部門で構成されます。
ロボット技術研究会が出場したAUV部門は、遠隔操縦を伴わずロボット自身がセンサの情報を元に判断し、走行する必要があります。競技は25mプールで行われ、水中に設置されたブイにロボットが触れる、ゲートを通過することにより得点されます。この競技による点数に加え、耐故障性や持ち運びのしやすさなどロボットシステムの技術を紹介するプレゼンテーションによって競い合いました。
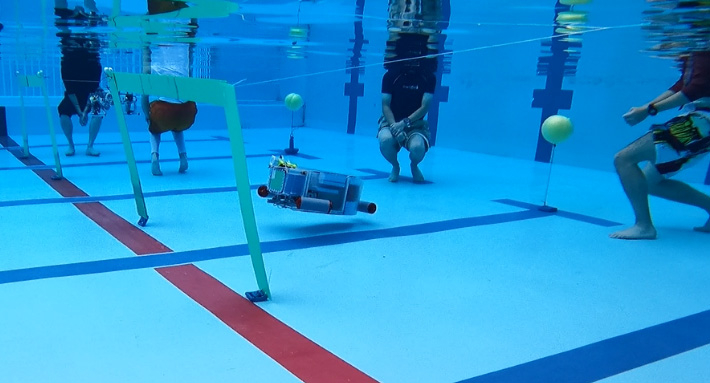
競技を行うロボット技術研究会の水中ロボット
水中ロボットは陸上を走行するロボットと異なり安定した地面がないため、平面内の運動だけでなく潜水や浮上の鉛直方向の移動を考える必要があります。従って水中のロボットでは推力を発生する装置が4個から8個程度と多数取り付けられることが多くあります。
ロボット技術研究会が製作した機体は、推力を生むスラスタが三角形の頂点の位置に3基配置された独特な形をしています(図1)。それぞれのスラスタは、アジマススラスタと呼ばれる推力方向を自在に操作できる機能を持っています(図2)。このような構成にすることで、図3のようにスラスタをすべて水平方向に向けると、陸上ロボットでよく用いられる3輪オムニホイール車と同様に、水平面内の前進・旋回・横移動を同時に行うことができます。一方でスラスタを鉛直方向に向けると、ヘリコプターやドローンと同じような構成になるので、潜水や浮上の動作を高速に行うことができます(図4)。モードチェンジの機能を持たせることで、少ないモータでメンテナンス性を向上させつつも、高い運動性能を実現し、機構がダイナミックに動作するため、見ていて楽しめる機体になりました。
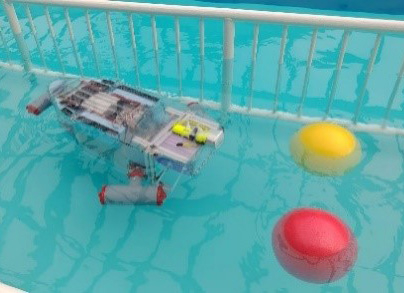
図1. ロボット技術研究会が製作した水中ロボット
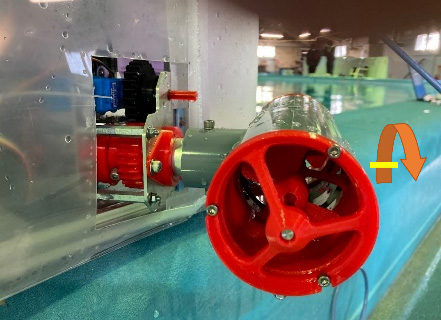
図2. 制作したアジマススラスタ(矢印の向きにスラスタ全体が回転する)
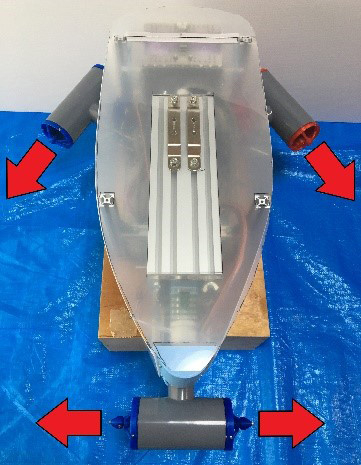
図3. 水平方向のスラスタ配置
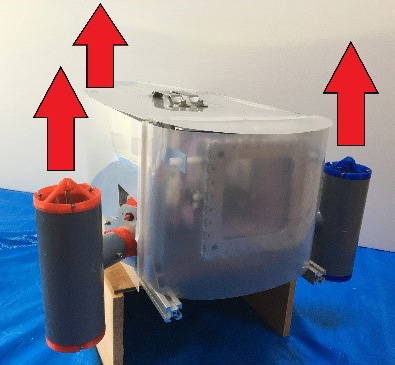
図4. 鉛直方向のスラスタ配置
競技会ではロボットに加速度センサや水圧センサ、カメラを取り付け、その情報を元に機体の自律制御を目指しました。競技では水中という特殊な環境での調整に苦戦するも、水中のゲートを通過し得点することができ、また、機体のオリジナリティや機械・回路の作りこみと技術の高さが評価され、総合で3位入賞となりました。
今回は初めて自律型の水中ロボットの制御をしました。当日ロボットを思うように動かせない場面もありましたが、それらも含めて貴重な経験になりました。水中ロボットの難しさも痛感し、いくつかの課題も発見できたのでこれからは大学で学ぶことのできる専門的な知識を生かし、より適応性のある洗練された制御をできるようにしたいです。