東工大ニュース
東工大ニュース
![]()
東京工業大学の学生サークル、ロボット技術研究会の水上・水中ロボットを扱うチーム「アクア研」が、11月6日~8日にかけて沖縄県宜野湾市とオンラインで開催された第6回沖縄海洋ロボットコンペティション・フリー部門で審査員特別賞を受賞しました。
今回参加したフリー部門は、自由なアイデアに沿ってロボットを制作し発表するものです。沖縄海洋ロボットコンペティションは、実際に沖縄の海でロボットを航行させる大会ですが、2020年はフリー部門がオンラインでの開催となり、チームメンバーの自宅から大会に参加しました。
機体は「イワトビ(ビークル)」と命名し、 "水中でのバッテリー交換が可能なロボット" をコンセプトに制作されました。ロボットが探査等の作業を行う上で、バッテリーの容量は大きな制約となります。そこで探査エリアの近くにバッテリー交換可能な基地をつくることなどが考えられます。しかし水中では、電気的な接続の繋ぎ替えを行うことはできません。
そこで機体を、動力を発生させるモーターが入ったパワーモジュールと、機体の制御を行うコントロールモジュールの2つに分離しました(図1)。これらのモジュールは完全に独立していて、互いにバッテリーを搭載しています。パワーモジュールからコントロールモジュールへの動力伝達は磁石を使って行うことで(図2)、電気的な接点がなく、水中でも安全な取り外しが可能になります(図3)。大きな電力を必要とするパワーモジュールを交換すれば長時間水中での探査を実現できます。
以上のコンセプトでロボットを作り始めましたが、新型コロナウイルス感染拡大のため施設の利用制限などでなかなか思った通りには制作が進みませんでした。大掛かりな工作機械を使わない設計に変更したり、各自の家で加工可能な設備を整えることでパーツや回路を作成したり、宅配便を使ってメンバー間で作ったものをやりとりしてどうにか進めていきました。
結果として、モジュールの交換までは何とか実現することができ、大会では審査員特別賞を受賞することができました。
しかし水中での実験には至っておらず、実装できていない機能も多くあります。今後も出来る限りの方法でものづくりを継続し、機体を完成させることを目指します。

図1. 作成した機体。正面の四角いフレームの中にあるパイプがパワーモジュール、それ以外がコントロールモジュール。パワーモジュールの中にはバッテリー・通信機・モーターが入っている
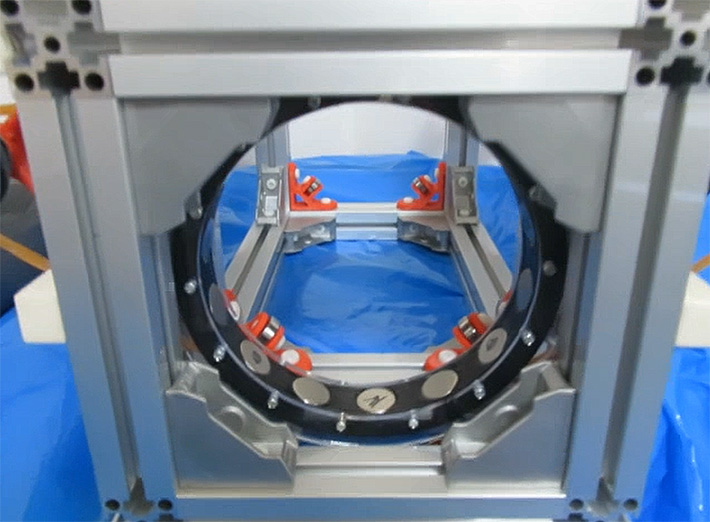
図2. 磁石による動力伝達部分(コントロールモジュール側)。この穴のような部分にパワーモジュールが入る
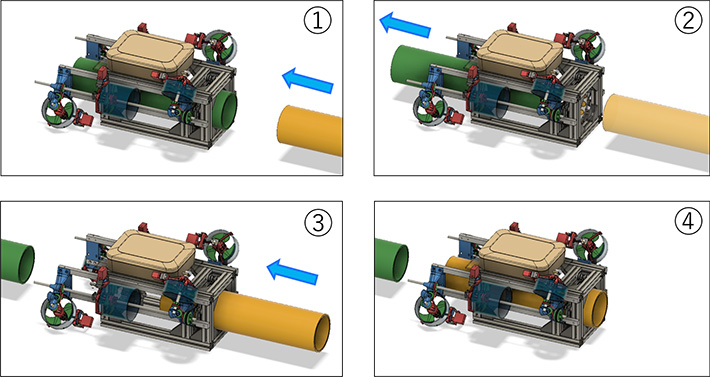
図3. パワーモジュール交換のイメージ図。モジュールを差し替えるだけで、簡単にバッテリーの交換を行うことができる