東工大ニュース
東工大ニュース
![]()
東京工業大学ロボット技術研究会のチーム「ロギ剣」が12月12日にオンラインで開催された「第11回ROBO-剣(アーム型)」で優勝、さらに制御技術賞、近藤科学賞もあわせて受賞しました。
この大会は一般社団法人二足歩行ロボット協会がものづくり技術の向上とロボットの普及を目指して開く、最大7軸のアーム型ロボットによる剣道大会です。例年は2台のロボットを対面させ、面、胴、小手、突きの4つの決め技を打ち合う競技となっています。しかし今年はオンラインでの開催となり、対戦相手としてダミーロボットが使用されました。これはペットボトルの指定された位置に面、胴、小手に対応する赤、青、黄のマーカーを取り付けたものです。今回は12チームが参加し、ダミーロボットに対する30秒間での有効打突数を競いました。
大会に出場したロボット技術研究会のチーム「ロギ剣」のメンバーは次の3人です。
ダミーロボットを相手に「面」「胴」の動きを繰り返す出場ロボット(右)
出場したロボット「Gano剣」(ガノケン、図1)はアームの大幅な軽量化を行うことで高速に打突を行うというコンセプトのもと、設計、製作されました。高さ90センチ、アーム部分の重さは350gです。ロボットの機構として他チームと大きく異なるのはワイヤーによる駆動系が採用されていることです。アームにはワイヤーが張られており、そのワイヤーを土台部分に固定したモータで引っ張ることでアームの駆動を行います(図2)。これによりアーム本体に重いモータを取り付ける必要がなくなり、非常に軽量なアームを実現しました。 ロボットの制御には今回のワイヤー駆動アームの特徴を考慮した関節制御を実装し、目標の動作への高速な追従を実現しました。またロボット本体にはカメラが取り付けてあり、相手ロボットの位置と向きを毎秒100回推定しています。ロボット開発にはシミュレーションなども活用し、効率良く開発を進めました(図3)。ロボットの機構、画像処理、制御についてはロボット技術研究会公式ブログの参加報告をご覧ください。
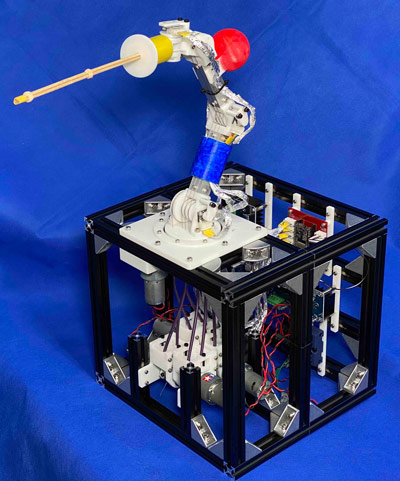
図1. 出場したロボット「Gano剣」。ワイヤー駆動を採用し、非常に軽量なアームとなっている
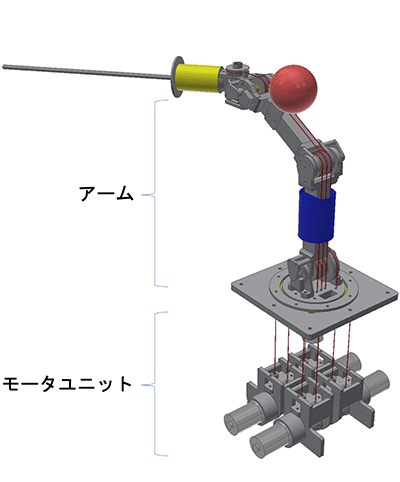
図2. ワイヤーによる駆動系。アームに張ったワイヤーを土台部分のモータで引っ張ることでアームを駆動する
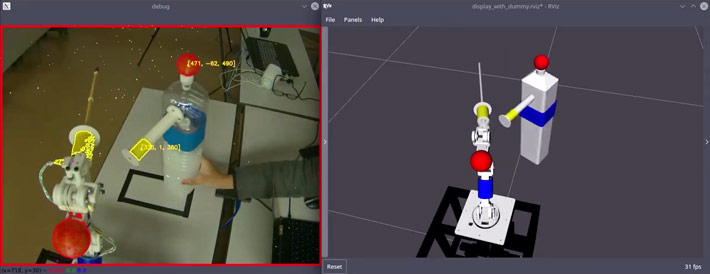
図3. カメラによる相手の位置推定とシミュレーション環境
結果として、大会本番にはロボットは良いパフォーマンスを発揮することができ、目標としていた優勝を果たせました。それに加え、ロボットの制御技術や機構の工夫なども評価され、制御技術賞、そして特別賞である近藤科学賞も受賞できました。 今回はオンラインでの大会開催でしたが、今後のロボット同士での対戦に向け更にロボットのアップデートを重ねていきます。
日本がその最前線を担うロボット技術(ロボティクス)を中心に、回路技術、ソフトウェア技術などについての研究開発を行う、東工大公認の技術(ものつくり)系サークルです。100名以上の部員が活動しています。
小さいながらも学内に部室を持ち、フライス盤、旋盤、ボール盤などの工作機械と、オシロスコープやパソコンなどの電子回路・ソフトウェア開発のサポート機材を揃えています。また、ロボットづくりという枠組みにとらわれず、「何をやってもいい」というのがこのサークルの特徴です。
知識がなくても、ゼロから設計に必要な数学的観点と、回路・工作の実学的観点を学べる環境があります。ロボット技術研究会には、研究室と呼ばれるグループがあり、それぞれのテーマを設けるなどして、様々なことを研究しています。