東工大ニュース
東工大ニュース
![]()
東京工業大学の公認サークルであるロボット技術研究会が、8月27~28日に山口県岩国市で行われた第8回「水中ロボットフェスティバル」に出場し、AUV(Autonomous Underwater Vehicle、自立型水中ロボット)部門にて3位入賞しました。
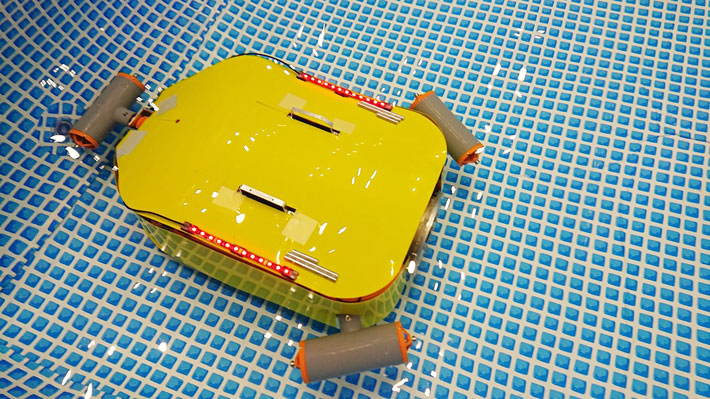
今大会に出場した「Kurione2」
水中ロボットフェスティバルは主に大学や高等専門学校の学生チームや研究室が参加する「AUV部門」と、主に中高生から高専生が参加する「ジュニア部門」の2部門で構成されています。2022年度の水中ロボットフェスティバルは、日本でも有数の規模の実験プールを持つ防衛装備庁艦艇装備研究所岩国海洋環境試験評価サテライト(IMETS)で初めて開催されました。AUV部門は手動操縦でのスラローム走行、自動航行でのゲート通過やQRコード検知などの様々なタスクをクリアすることで得点を獲得し、その総合点を競うものです。競技の順位に応じて得られた点数の他に、ロボットの機能や工夫点を説明した紹介動画の評価点が加味されて総合順位が決定されます。

岩国水中ロボットフェスティバルの会場となったIMETS
本大会に出場したチーム「アクア研」は、ロボット技術研究会の中でも水上・水中ロボットをテーマとして活動しています。地上のロボットと水中ロボットの大きな違いは、機体の運動方向の多様さです。水中ロボットは空中の飛行機と同じように、水中の三次元空間中を運動します。立体的に運動する水中ロボットでは、陸上のロボットのような平面上の運動に加えて鉛直方向の運動が加わるため、位置や姿勢のとり方が一段と複雑になります。この複雑な位置や姿勢を制御するために、一般的な水中ロボットには推力を発生させるスラスタが4個から8個ほど搭載されます。
今回出場した「Kurione(クリオネ)2」はこの三次元ならではの運動に着目して設計・製作されました。この機体の大きな特徴の1つは、推力方向を変化させることができる「アジマススラスタ」と呼ばれるスラスタです。Kurione2にはこのアジマススラスタが三角形の頂点の位置に3つ配置されています。このアジマススラスタが3つとも水平方向を向いた状態は「オムニモード」(図1)と呼ばれ、陸上のオムニホイールを用いた三輪ロボットと同様に平面方向の運動を自由に行うことができます。鉛直方向の移動をする際は、アジマススラスタをすべて鉛直方向に向けた「ドローンモード」(図2)に変形します。これによって、まるでドローンのように水中での潜行や浮上が可能になります。状況に応じてこの2つのモードを切り替えることで目的の動きを実現するというのがKurione2のコンセプトです。

図1.「オムニモード」矢印の方向に推力が発生し、水平方向の移動ができるスラスタ
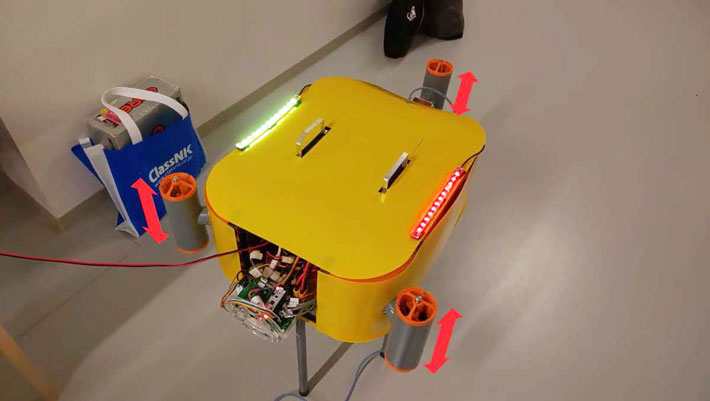
図2.「ドローンモード」矢印の方向に推力が発生し、鉛直方向の移動ができるスラスタ
Kurione2の工夫点は防水技術にもあります。ロボットを制御するために必要なバッテリーや電子回路にとって浸水は致命的です。そのため、水中ロボットには回路やバッテリーを水から保護する防水容器が必要となります。今回の水中ロボットフェスティバルが開催されたIMETSのプールは水深11mであるため、プールの底付近での高い水圧にも耐えうる防水容器を製作する必要がありました。
この対策として、アクア研ではアルミのロウ付け技術を利用した防水容器を製作しました。ロウ付けとは溶接の一種であり、ロウ材を熱によって溶かして金属同士を接合する加工方法です。いままでアクア研で作成していた防水容器には主に接着剤が利用されていましたが、ロウ付けすることでより強固に材料を接合することができ、11 mの水圧にも耐えることができました。

ものつくり教育研究支援センターで行ったロウ付け作業

完成した防水容器
岩国水中ロボットフェスティバルのAUV部門はその名が示すようにロボットを自立的に動かすタスクが設定されています。そのような自立タスクをクリアするために、Kurione2は前面のカメラの他に慣性計測センサや自作の水圧センサを搭載しています。当日はトラブルが発生したため戦略通りタスクを達成することは叶いませんでしたが、手動操縦で安定して得点を獲得したことで総合3位に入賞することができました。
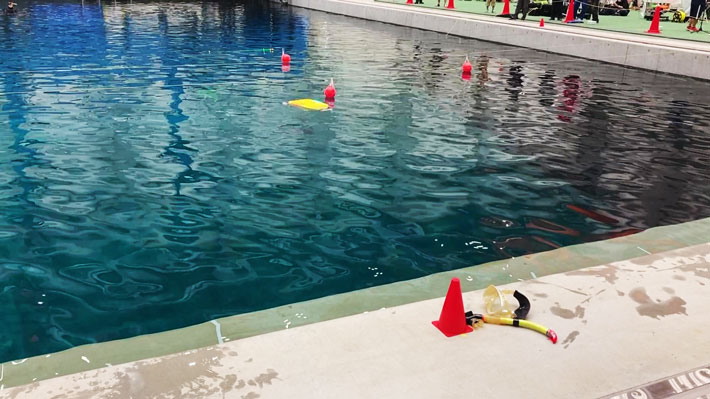
タスクに挑戦するKurione2
今回の大会では今までのものと異なり、耐水圧検査がありましたが無事に検査を乗り切ることができてよかったです。私も関わった制御の方では想定外の問題やミスがでてしまったこともあり、あまり順調に動かすことはできませんでした。大学の講義で制御の基礎理論も学んだので、今回の経験を生かして次こそはロボットをスムーズに動かしたいです。