東工大ニュース
東工大ニュース
![]()
公開日:2015.08.04
東京工業大学と東京医科歯科大学の両大学発のベンチャー企業 リバーフィールド株式会社(本社:東京都新宿区、社長:原口大輔)は、小型・軽量で操作性に優れた内視鏡ホルダーロボット「EMARO(エマロ):Endoscope MAnipulator RObot」を開発し、本年8月より販売を開始します。販売は医療関連製品のトップメーカーである株式会社ホギメディカル(本社:東京都港区、社長:保木潤一)を通じて行います。
EMAROは東京工業大学精密工学研究所の只野耕太郎准教授と東京医科歯科大学生体材料工学研究所の川嶋健嗣教授の空気圧を用いた超精密制御技術に関する10年を超える研究成果を活かした世界初の空気圧駆動型手術支援ロボットです。
近年、外科手術において、術後の回復が早い、傷口が小さいなどの利点から、開腹手術に代わって低侵襲手術が広く行われています。低侵襲手術は身体への侵襲度が低い医療機器を用いた診断・治療で、特に内視鏡外科手術が注目されています。内視鏡を操作するにあたっては、スコピストと呼ばれる助手の医師が内視鏡の操作を行う必要があり、執刀医との円滑な意思疎通が求められることや手振れの発生などが問題となっており、内視鏡操作を支援する新たな医療機器の需要が高まっていました。既存の内視鏡ホルダーロボットは電動モーター駆動を用いており、空気圧駆動のような柔らかさを出すには不向きです。

EMARO外観図
EMAROは頭部にジャイロセンサーを装着した執刀医が、頭を上下・左右に傾けると、その動きを感知して、空気圧で内視鏡を動かします。動く自由度は、内視鏡の抜き差し(前後)、上下、左右、そして回転の4つがあり、頭部の動きと足元のスイッチを組み合わせて制御します。従来、超精密制御を要求される手術関連のロボットに連続的な空気圧制御を行うことは大変困難でしたが、東京工業大学香川利春教授の永年に渡る流体計測制御技術を基盤として、只野准教授と川嶋教授が空気圧駆動系の厳密なモデル化と独自の制御技術の導入により極めて精密な空気圧制御を実装することに成功しました。空気圧駆動は産業用ロボットなどでも掴む動作に使われているように、動きが非常に柔らかく滑らかで、しかも安全性が高いという利点があります。また、直径約10mmと注射器サイズの小さなシリンダーへの空気の出し入れだけで大きな出力を得ることができる機構のため、大幅な小型化・軽量化を図ることができます。
EMAROを用いることにより、執刀医はスコピストを介することなく、望む画像を手ぶれなしに得ることができ、より正確な手術を行うことができます。また、スコピストの役目をEMAROが担うため、医師不足に悩む中小規模の病院でも腹腔鏡手術が可能となり、より多くの患者がこの手術を受けられるようになります。
EMAROは超精密空気圧制御技術を生かした手術関連ロボットの第一弾です。現在、空気圧駆動型の鉗子を有する手術支援ロボットシステムを開発中です。この最大の特長は、鉗子にかかる力を空気圧を通じて検出し、執刀医にフィードバックできることです(力覚)。手術支援ロボットでは、執刀医は患者から離れたところにあるコンソールの前に座り、内視鏡の画像を見ながら両手でコントローラを動かして鉗子や内視鏡を操作します。力覚があれば、自分の手で直接手術しているような感覚をもてるので、手術の精度がより高くなると期待されています。
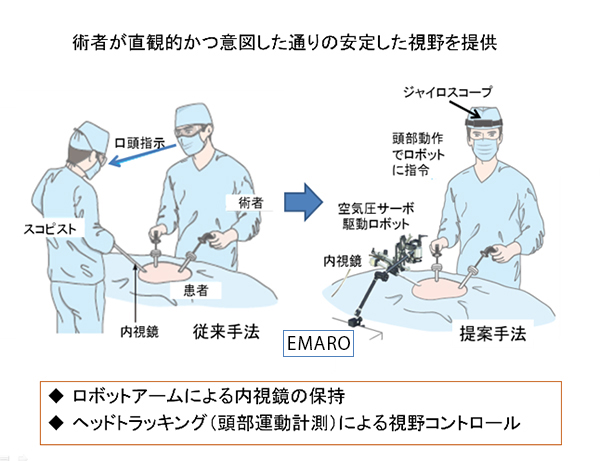
図1. 内視鏡操作システム(左が従来法、右がEMAROを使った操作)
項目 |
内容 |
備考 |
|---|---|---|
販売名 |
内視鏡用ホルダ EMARO |
|
型式 |
EMR-RS01 |
|
区分 |
クラス1(一般医療機器) 特定保守管理医療機器 |
届出番号:13B3X10174000001 特管第五区分:光学機器関連 |
販売地域 |
日本国内 |
|
駆動原理 |
空気圧駆動 |
|
自由度 |
4自由度 (上下、左右、前後、回転) |
|
外形寸法 |
幅732mm×奥行1743mm×高さ1933mm |
最大伸長時 |
重量 |
125kg |
付属品含まず |
定格電圧・周波数 |
AC 100V ・ 50/60Hz |
|
操作インタフェース |
|
|
設定値 |
各自由度毎に5段階で速度調整可能 |
コンソールパネルにて調整 |
対象診療科 |
呼吸器外科、外科、泌尿器科、婦人科 |
|
搭載可能内視鏡 |
市販されている一般的な硬性内視鏡(φ10mm、φ5mm) |
斜視鏡用カメラヘッド固定パーツも有り |
リバーフィールド株式会社概要
設立日 : |
平成26年5月20日 |
所在地 : |
東京都新宿区西新宿7丁目3番4号 |
資本金 : |
210百万円
|
代表取締役社長 : |
原口大輔 |
社員数 : |
16名 |
事業内容 : |
手術支援ロボット等の医療機器研究開発および販売 |
沿革 : |
|
問い合わせ先
東京工業大学 広報センター
Email : media@jim.titech.ac.jp
Tel : 03-5734-2975 / Fax : 03-5734-3661
東京医科歯科大学 広報部広報課
Email : kouhou.adm@cmn.tmd.ac.jp
Tel : 03-5803-5011 / Fax : 03-5803-0272
リバーフィールド株式会社
Email : info@riverfieldinc.com
Tel : 03-5332-8250 / Fax : 03-5332-8251