研究
研究
![]()
![]()
vol. 11
精密工学研究所 高機能化システム部門 准教授
只野耕太郎(Kotaro Tadano)
「頭を動かしてみてください。そのとおりに内視鏡の画像も動きますから。」

只野に言われるままに、頭部にヘッドマウントディスプレイを装着し、上下左右、前後に、さらには回転させたりと頭部を任意に動かしてみる。すると、眼前のディスプレイに映し出された内視鏡映像が頭の動きに合わせて動く仕組みになっている。しかも、微細な動きにも敏感に反応する。まるで、自分自身の目でダイレクトに患部を見ているようなリアルな感覚だ。実は、頭部の動きを感知した角速度センサーに同期してロボットアームが動作し、内視鏡を頭が動いた方向へ動いた量だけ動かしているのである。
これは只野が文部科学省の大学発新産業創出拠点プロジェクト(START)のもと、取り組んでいるプロジェクト「気体の超精密制御技術を基盤とした低侵襲手術支援ロボットシステム」の一環で開発されたものである。近年の外科手術では、患者の負担が大きい開腹手術に代わり、開口部を最小限に抑えて内視鏡を挿入し、画像を見ながら処置を行う腹腔鏡手術が普及しており、さらに一部では「手術支援ロボット」が導入されつつある。この分野の先駆けともいえるダ・ヴィンチ(da Vinci Surgical System)[用語1]はその代表例である。しかしながら、大型でセットアップに手間を要し、高価格のため、なかなか手が届かないのも実情である。また、電動で精密な動きを実現している反面、動きが硬く外部からの力も検出できない。
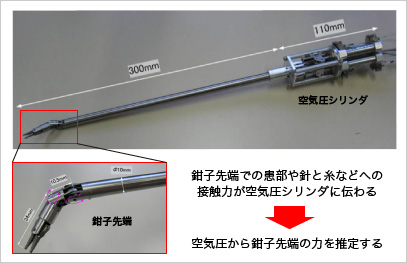
これに対して、只野の手術支援ロボットは動作のために電動ではなく空気圧駆動を用いる。患部を掴んだり牽引する鉗子を操作する「鉗子ロボット」と、内視鏡を遠隔操作する「内視鏡操作システム」の2つから構成され、いずれも空気圧駆動を採用している。臓器に機械が触れてもタッチが柔らかいため、傷つける心配がない。さらに機械全体が軽量化され、セットアップ等が簡単になるなど、空気圧駆動ならではの利点が目白押しである。正確な位置決めも、シリンダーの圧力を精密に制御すればまったく問題ない。最大の特長は、患部に触った力を鉗子につながった空気圧シリンダーを通じて術者にフィードバックできる仕組みである。これにより、患部に触れる力を繊細かつ精度良く制御できるようになり、より困難な手術にも効果を発揮できる。ダ・ヴィンチをしのぐ手術支援ロボットにもなりうると期待されている。
「電動はギヤを使って減速することで一定の位置決め精度を簡単に実現できるというメリットはありますが、その分タッチが強くなります。空気圧の場合、外部からの力の検出が可能で動作を柔らかくすることもできるため、患部と接触する際の力を調整できるんです。人と接触するロボットですから、接触時の力を吸収できるという人との親和性の高さが、空気圧の最大のメリットでもあるわけです。」
STARTプロジェクトでは、まず内視鏡操作システムを独立させて実用化に向けた取り組みを始めている。2012年11月に一般医療機器(クラスI)として届出を行い、大学病院の協力の下で臨床現場でのテストを実施してきた。2014年度中の国内販売、さらには海外のマーケットも視野に入れながら、着々と準備が進んでいる。鉗子ロボットは3、4年後の事業化を目指しているところだ。これらの事業化に向けて、只野と学生時代に彼の指導教員であった川嶋健嗣客員教授(東京医科歯科大学 生体材料工学研究所教授)らがベンチャー企業、リバーフィールドを2014年5月に設立した。ちなみに、企業名のリバーフィールドとは、社長を務める川嶋の「川」と、只野の「野」を英語でつなげた名称である。
宇宙工学の世界に憧れ、北海道の高校を経て東工大に進学。大学院の修士課程より、それまでの物理系から機械系(総合理工学研究科・メカノマイクロ工学専攻)に研究の軸を移した只野は、当初建設機械の遠隔操縦ロボットの研究を自分のテーマに据えようと考えていた。当時、ちょうどダ・ヴィンチが脚光を浴び、「医工連携」によるイノベーションの新潮流ににわかに注目が集まり始めていた。そこで、指導教員であった川嶋は、只野に「一緒に手術支援ロボットシステムの研究・開発をしてみないか」と声をかける。この誘いに"最先端の匂い"を感じた只野は、二つ返事で医療用ロボットの開発に応じた。
「実は、川嶋先生はその当時、建設機械の遠隔ロボット開発に携わるかたわら、新たなテーマを模索しているところでもあったんです。ダ・ヴィンチは遠隔操作型の医療用ロボットとして当時すでに実用化されていましたが、手術支援ロボットも遠隔操作という点ではこれまでの研究と共通事項が多いですから、ピンと来るものがあったのでしょう。そんな背景も手伝って、私に新たな研究の手綱を取らせてくださったんだと思っています。」
こうした契機を発端に、“医工連携による手術支援ロボットの開発”という分野に飛び込んだ只野。ちょうどこの頃から、四大学連合[用語2]の一つである東京医科歯科大学と交流を持つようになり、只野らも足繁く大学病院の医師のもとに通っては情報収集を行ったり、コンセプトを提示して意見を聴いたりしながらロボット開発を進めていった。が、異分野ゆえのさまざまな捉え方の違いに、当初は戸惑いも多かったという。

「まず衝撃を受けたのは、圧倒的にスピード感が違うことです。例えば、『こういうロボットを考えてみたのですが』と医師にモデルを示すと、『いいね。それ。じゃ、来月持って来れる?』との回答。また、工学系の研究者にとってはモノを作るためには数値を決めて設計しなくてはならない。一方、医師は数値ではなく感覚で答えるため、その説明をいかに数値に落とし込んでいくか苦心しました。それだけ、医学と工学の間を埋めることには課題があることを、身をもって学んだ次第です。」
開発協力を求めていくのは医師ばかりではない。医療ロボットの開発には、電気系や光学レンズなどさまざまな分野の技術協力が必要となる。
「5、6年ほど前は、医療の世界を変えていくという可能性に関心を示すものの、まだリスクの大きさを気に留めて足踏みする企業が多く、なかなか前進できない時期がありました。」
このままでは研究が実用化に結びつかない……新しい軸が必要だ。そう思っていた矢先に、今回のSTARTプロジェクトの話が浮上。川嶋教授とともにエントリーしたところ、みごと採択となったわけである。学生時代から、地味ながらも粘り強く研究を続けてきて、本当によかったと只野はこれまでの十数年を振り返る。
「究極的には、手術の方法自体、全く新しいやり方を構築してしまうことを念頭に据えながら、日々研究を進めています。新たな発想の医療ロボット開発により、患者さんの負担も少なく、『こんなに簡単にできるんだ』といった具合に手術自体を変えていくことが、目指すべきところであると捉えています。」
製品化に向けて準備を勧める一方で、後輩たちの育成にも力を注いでいる。研究室の学生を対象とし、研究テーマは大学病院の医師よりニーズを汲みながら、論文とリンクさせるよう設定。論文完成の観点から、1年ないし1年半で一つのシステムやロボットを完成させるという流れだ。
「工学系の学生が大学病院の先生とディスカッションしながら機材の研究・開発を行うという機会はそうそうありませんので、学生にとっても経験自体がたいへん刺激になっているようです。また、学生のうちに技術者と医師の視点の違いを、自分たちの試作品を通して学べることは、一人ひとりの未来に少なからずプラスに作用すると考えています。何よりも、ロボットについてコンセプト・設計から開発まで、製品化を念頭においてひと通り学べるというのは、学生にとっては貴重な経験になるのではないかと思います。」
夢の広がる医療ロボットの未来。最後に、後輩たちに向けて只野はこう言い添えた。
「私自身もそうでしたが、興味を持って取り組んでいると、困難な勉強も不思議と苦にならないんですね。関心が向けられる分野やテーマを見つけて、とことん好きになる。何か一つ、『自分はこれを極めるんだ!』くらい打ち込めるものさえ見つかれば、あとは貪欲に吸収していくことで、チャンスは必ず廻ってきます。」
用語説明
[用語1] ダ・ヴィンチ : 米国インテュイティヴ・サージカル社製の内視鏡下手術用医療ロボット。2000年7月にアメリカ食品医薬品局(FDA)より承認。日本では2009年に厚生労働省より製造販売が認可され、国内の病院でも導入されている。
[用語2] 四大学連合 : 東京を拠点とする東京医科歯科大学、東京外国語大学、一橋大学、東京工業大学の4つの国立大学が2001年(平成13年)3月15日に締結した、四大学連合憲章に基づく相互教育研究プログラムの通称。

只野耕太郎(Kotaro Tadano)
東京工業大学 精密工学研究所 高機能化システム部門 准教授

スペシャルトピックスでは本学の教育研究の取組や人物、ニュース、イベントなど旬な話題を定期的な読み物としてピックアップしています。SPECIAL TOPICS GALLERY から過去のすべての記事をご覧いただけます。
2015年1月掲載