研究
研究
![]()
![]()

vol. 31
工学院 機械系 准教授
葭田貴子(Takako Yoshida)
ロボットやAIの発展により、人間と機械との融合が進んでいる。それに伴い、安全・快適な操作や事故発生時の責任の所在といった新たな課題に、心理学と機械工学の両面から取り組んでいるのが葭田貴子だ。

バーチャルリアリティ(VR)におけるアバター※1から、遠隔操作ロボット、ウェアラブルコンピュータ、自動車の半自動運転に至るまで、ITやロボット、人工知能(AI)の急速な発展に伴い、人間と機械との融合が進んでいる。
機械との一体感や臨場感、没入感とは何か。機械との融合により、人間の脳や身体はどのような影響を受けるのか。今後、人間と機械はどのように融合していくことが望ましいのか—。こういった課題に、葭田は、心理学と機械工学の両面から取り組んでいる。
これまでロボットは機械工学、AIは情報科学の専門家が中心となって研究開発を進めてきた。しかし、今後、ロボットやAIが我々の生活の中に深く入り込み、時に融合し、共存共栄を図っていくためには、機械工学や情報科学だけでなく、認知科学や脳科学に加え、哲学や法学、医学などさまざまな分野の専門家が同じテーブルにつき、我々人類は一体どのような未来社会を構築すべきかを一緒になって考えていく必要がある。「今まさにその時期にきていると感じています」と葭田は語る。
そして、「このテーマに取り組むためには、視覚、触覚に加え、眼の動きや手の動きなど体性感覚と呼ばれる感覚の3つを研究する必要があります。これらすべてを扱わないと、機械との一体感や臨場感を実現することが難しいのではと議論が進んでいるからです。機械工学や情報科学の分野では、マルチモーダル※3やクロスモーダル※4と呼ばれています」と説明する。
たとえば、葭田がこれまで取り組んできた「コンピュータビジョン・ヒューマンビジョン」は、人間の眼のしくみの研究と、ロボットやコンピュータに人工的にヒトの眼のような仕組みを実現させる研究の双方に基づき、最適な視覚機能(画像認識処理)を考えるという研究だ。
実は人間の眼は、真正面中央のごく狭い範囲の色や形しか正確にとらえることができない。それにもかかわらず、視野の周辺部までくっきり視野が見えるように感じるのは、見たいという意思や意図に伴う頭部や眼球の動きを利用しながら、何らかの仕組みで脳が映像を補完しているからと考えられる。「この事実を逆手に取ることで、違和感なく一体感や臨場感を向上させることができるのです」
VRでアバターなどを操作する場合、リモコンとアバターの動きにある程度ズレ(遅延)があると、人間は一体感や臨場感が急激に低下してしまう。そこで、インターネットを介して映像を送信する場合、人間の眼が見ている領域は高解像度・フルカラーで正確に表示し、あまり見ていない領域はそこそこの解像度や正確さで送信することで、遅延を抑制しつつ、見ているヒトにとって一体感や臨場感を維持する画像提示方法が研究されている。

「アイ・トラッキング」と呼ばれる技術を使って、人間の眼の中心視野と周辺視野に異なる映像を見せる実験の様子。人間の眼は視線の中心や注意を向けているところの近くは正確に認識できるが、その周りは余り見えていない可能性がある。しかしそれを普段の生活で自覚することは少ないため、視線を向けたところの周りにだけ文字を映し出したり(中心視マスク)、逆に視線を向けたところの周りにだけ文字ではないものを映し出した状態(周辺視マスク)で文章を読んでもらう。自分がどれくらい視野の中心だけで文字を読んでいて、それ以外の視野を見ているつもりでも正確に見ていないかが体感できる。
一方、現在、葭田が、日本医療研究開発機構が主催する『脳とこころの健康大国実現プロジェクト![]() 』で注力しているのが、「パワーサポートロボット」だ。
』で注力しているのが、「パワーサポートロボット」だ。
これは、人間が装着することで、身体の動きをサポートするウェアラブルロボットで、将来的には、身体や脳に障害を負った人向けの医療機器を想定している。現在のところ、動きはコンピュータで制御しているが、今後、必要に応じて、ブレイン・マシン・インターフェース※5や筋電義手のように、脳波や筋電位を使った制御にも原理上対応は可能という。
「他のウェアラブルロボットとの最も大きな違いは、パワーサポートロボットを装着しながら、fMRI(磁気共鳴機能画像法)で、リアルタイムに脳の血流の状態を計測できることです。それにより、ロボットが装着者の意志や意図の通りに動作しているときと、意志や意図に反して動作しているときの脳の状態の違いが分かります。ロボットが人間の感覚や脳に与えている影響を定量化することができるのです」
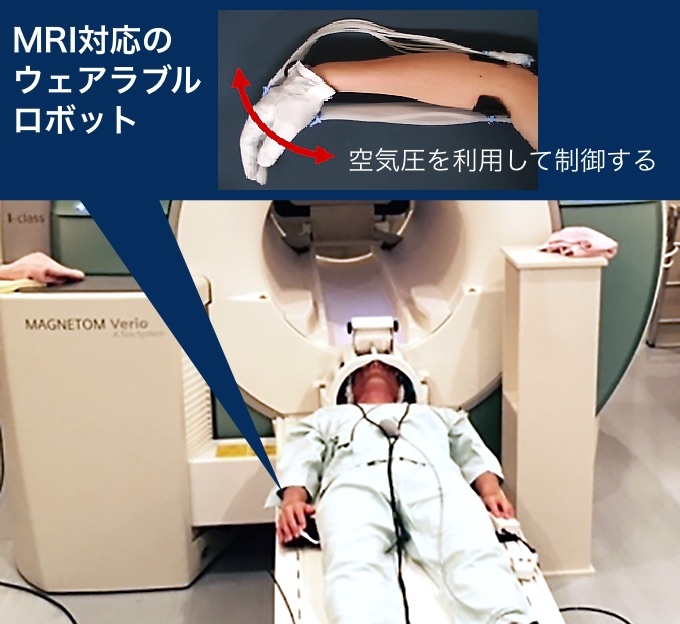
着たまま脳の状態が計れるパワーサポートロボット
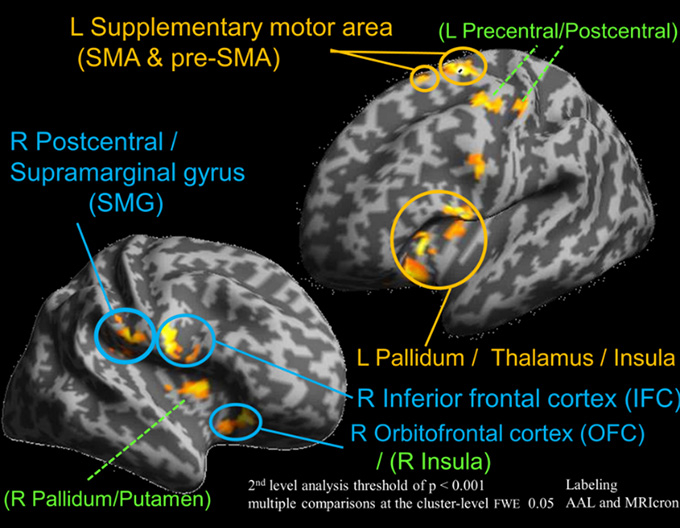
パワーサポートロボットを実際に着用しているヒトの脳活動をfMRIで撮像したもの(ロボットが自分の意思や意図通りに動いていないときの脳活動を示している)
この独自のパワーサポートロボットは、 工学院 機械系の鈴森康一教授が開発した人工筋肉を応用している。通常、ロボットのアクチュエータ(駆動装置)には金属が使われているが、fMRIに使われるMRI装置は強磁場のため、金属を装着した状態で、MRI装置の中に入ることはできない。それに対し、ソフトアクチュエータは、シリコーン製の繊維でできているため、装着したままMRI装置に入ることができる上に、高磁場でも問題なく動作するのが特徴だ。
ソフトアクチュエータは、シリコーン製の繊維でできていて、中には細いチューブが通っている。このチューブの中に空気を出し入れすることで、ソフトアクチュエータを伸縮させ、身体の曲げ伸ばしをサポートしている。
fMRIによるデータ解析に加え、人間の感覚や感性を科学的な方法で定量化できるのも、葭田の強みだ。
「『心理物理学的測定方法』と呼ばれる手法を使っています。心理学の分野では、どのような物理的情報を与えれば、人間にどのような感覚が発生するかという物理と心理の対応関係が研究されています」
たとえば、操作しているロボットの動きが300ミリ秒(0.3秒)遅れるだけで、人間はロボットとの一体感を感じなくなることが、こういった測定方法から明らかになっているという。
「人間と機械が融合するためには、人間がそれを安全・快適に操作できるか、人間が伝えたい情報がより正確に伝わっているかを検証することが重要です。そのため、私の研究室では、機械を認知科学や脳科学のレベルまで遡って、検証しようとしているのです。それによって初めて、自分の身体の一部のような操作性を持つパワーサポートロボットを実現できると考えています」
ロボットやAIとの共存も葭田の重要な研究テーマだ。現在、科学技術振興機構(JST)の社会技術研究開発センターが推進する研究開発領域『人と情報のエコシステム![]() 』のプロジェクトに参画し、法学者や哲学者との共同研究を進めている。
』のプロジェクトに参画し、法学者や哲学者との共同研究を進めている。
「プロジェクトでは、AIやAIを搭載したロボットが思わぬ事件や事故を起こした場合、メーカー、ユーザー、AIのいずれが責任を負うべきかという課題について、議論を重ねているところです」
まず、メーカーに責任を負わせるといった場合、次のような課題の発生が考えられるという。「エンジニアにとってAIやロボットの開発はリスクを伴うものになりかねないため、AIやロボット産業全体の萎縮につながる可能性が予想されます。また、AIはユーザーを通して機械学習し、変化していくので、メーカーにすべての責任を負わせるのはおかしいといった意見もあります」
さらに、ウェアラブルロボットや自動車の半自動運転の場合、人間自身の身体や自動車という1つの対象に対して、人間と人工的な判断システム(AIを含む)という2つの頭脳が制御することになる。人間とAIとでは、常に判断が一致するとは限らない。どちらを優先すべきかは、非常にむずかしい問題だ。それによって責任の所在も変わってくる。
そもそもAIやロボットに責任を負わせるというのは、可能なのだろうか。
「現在、AIやロボットがどれくらいの能力を持つようになれば、法律上、人間と等価に扱うことができるのか。それ以前に、AIやロボットに常識や感情を持たせることはできるのか。あるいは、持たせるべきなのかなど議論は尽きません。その一方で、『責任の追及は近代の西洋社会の比較的新しい考え方の一つに過ぎない』との考えの下、責任の所在を追求することなく、AIやロボットによる事件や事故を解決するための新たな方法を提案する動きも始まっています」
近年、「シンギュラリティ※6」という言葉を頻繁に耳にするようになる中、人間と機械との融合、人間とロボットやAIとの共存に向けて、解決すべき課題は山積しているという状況だ。
「このような課題を解決するには、法学者や哲学者、社会学者の視点だけではなく、人間の脳や心理への影響を科学的見地から解明することが必要だと思っています」と語る葭田。
最後に、学生、若手研究者にメッセージを送ってくれた。「多くの若者が、文系か理系か、工学系か理学系かなど所属する分野や組織を気にする傾向にあるように感じています。しかしあまりそれに捉われることなく、自分は何に興味があり、人生を賭けて何を追求したいのかをしっかりと見定めてほしいと思います。その目標達成や結果の表現方法が、私のように人間の感覚知覚を扱う領域では科学者のみとは限らなくなってきており、起業したり、メディアアーティストや文筆家として社会に表現していく人も増えています。自分を小さな枠組みの中に閉じ込めて可能性を狭めることなく、自分ならではの方法で、自ら掲げた目標を達成してほしいですね」

葭田研究室のメンバー
自己(ユーザー)の分身となるキャラクターのことで、アバター利用者であるユーザーに模した姿にする時もあるが、あえて性別や姿を変えて別の自己になりきる場合もある。
機器やソフトウェア、システムなどとその利用者の間で情報をやり取りする仕組み。
視覚や聴覚、触覚、嗅覚といった五感の中のどれか一つだけではなく、それらの組み合わせや、そこに体性感覚(平衡感覚、空間感覚など)を組み合わせた複数感覚を積極的に取り入れる考え方のこと。
視覚と聴覚、視覚と触覚、味覚と触覚など、複数の異なる感覚モダリティからの情報が互いに影響を及ぼし合うこと。
脳波等の脳情報の検出・抽出や、逆に脳への刺激などといった手法により、脳とコンピュータを含む外部機器をつなぐインターフェース技術や機器等の総称。
人工知能(AI)が人類の知能を超える転換点(技術的特異点)。または、それがもたらす世界の変化のこと。

葭田貴子(Takako Yoshida)
工学院 機械系 准教授

スペシャルトピックスでは本学の教育研究の取組や人物、ニュース、イベントなど旬な話題を定期的な読み物としてピックアップしています。SPECIAL TOPICS GALLERY から過去のすべての記事をご覧いただけます。
2018年6月掲載