研究
研究
![]()
![]()

「ロボット研究は一言で言えば目的達成学。何のために作るのかが重要なんです。社会の役には立たないけれども面白い研究はいくらでもあります。しかし私は常に社会に本当に役立つものを作るという信念の下、ロボット研究を行ってきました。ですから、私の持っている知識や技術が役立つというのであれば、別にロボットという形でなくても全然構わないと思っているんです」
数多くの独創的なロボットの開発で世界的に著名なロボット研究者、広瀬はロボット研究の目的をこう語る。そしてこう続ける。
「特に今、日本は福島第一原発事故の後処理や、笹子トンネルの崩落に代表されるインフラや建造物の老朽化など数多くの問題に直面しています。そういった山積する問題に対して、最適な解決策を提供することが私や東工大に課せられた使命であり、それによって初めて我々の存在意義を世の中の人たちに認めてもらうことができると思うのです」
広瀬が東工大大学院制御工学専攻に進学したのは、1971年4月のことだった。1976年には同専攻博士課程を修了し、助手、助教授を経て、1992年には機械物理工学科(現在の機械宇宙システム専攻)の教授となった。そして、2013年3月、65歳となる広瀬は、42年間に及ぶ東工大でのロボット研究者としての生活に一区切りつけようとしている。その間、育てた博士課程の学生の数は41人、修士課程の学生の数は300人を超える。
退職後は、広瀬の研究室の卒業生と留学生が2004年に立ち上げた東工大発ベンチャー「HiBot(ハイボット)」を拠点に活動していく計画だ。HiBotは「ヒロセ・ラボラトリー・ロボット」の頭文字を取った社名で、最先端ロボットとロボット制御に不可欠な制御・駆動用コンポーネンツの開発、販売を行っている。

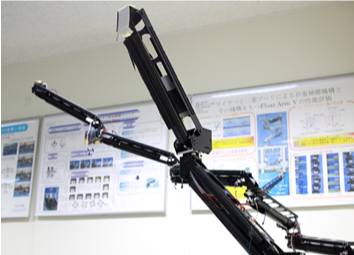
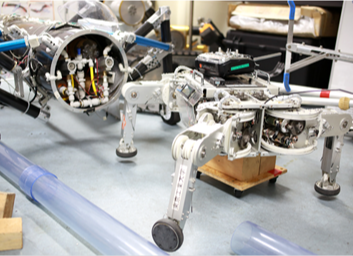
水陸両用ヘビ型ロボット「ACM-R5」。ヘビが身体をくねらせて推進力を発生させるしくみは、地上でも水中でもほとんど変わらない。そこで、広瀬は水に対してエッジの役割をする水かき板を胴体の側面に取り付け、推進力を出すようにした。加えて、水かき板に小さな車輪を付けることで、陸上でも素早く動けるようにした
すでに広瀬の元にはHiBotを通じて多方面から原発事故関連の相談が複数寄せられている。原子炉の放射能汚染除去、その後に続く原子炉の解体などロボットを使った遠隔操作でなければ進められないことが山ほどあるからだ。
中でも「このロボットにしかできない」と言われ期待を寄せられているのが、水陸両用ヘビ型ロボット「ACM-R5」だ。これは2005年に開催された愛知万博で初めて一般公開され、話題となったロボットだ。現在、瓦礫と水が散乱する原発事故の現場では、わずか十数センチのすき間に入り込み、内部の様子を偵察できるロボットが求められている。このようなことができるのは現在のところ、ACM-R5以外にないという。
そもそもロボット研究の分野において、広瀬の名を最初に広く知らしめたのが、1972年に完成させたヘビ型ロボット「ACMⅢ」だった。ACM-R5の原点となるロボットだ。
「当時、ヘビ型ロボットなんて研究している人は世界中探しても私だけでしたから、学会に持っていくとどの会場でも大ウケでしたね」 と広瀬は振り返る。
実は、広瀬が東工大の修士課程に進学したのもヘビのように柔らかくてフニャフニャした機械を作りたいと思ったからだ。
「私はスプートニク世代なので、横浜国立大学の学生時代は宇宙やロケットに興味があり、隣でロボットを作っている同級生を見て、なんてつまらないことをやっているんだろうと思っていたんです。ところが、ある時、『ロボコン博士』のニックネームで知られる森政弘東工大名誉教授が著書の中で、“柔らかい機械”の面白さについて述べられているのを読み、是非とも自分の手で柔らかい機械を作ってみたいと強く思ったんです」
そして、東工大の梅谷陽二教授の研究室に入り、最初に挑戦したのがヘビ型ロボットの開発だった。
モチーフにヘビを選んだ理由は、細長くしなやかな動きをするロボットを作ることができれば、災害救助や配管点検などさまざまな用途に役立てられるのではないかという工学的な期待に加え、なぜヘビは足がないにも関わらず、あんなに素早く滑らかに移動したり、木に登ったり、泳いだりできるのかを力学的に解明したいという理学的な興味があったからだ。
広瀬が研究開発に着手した1971年当時、ヘビがどのようなしくみで移動しているのかを工学的に研究している学者は1人もいなかった。そのため、広瀬はまずはヘビの動きを詳しく調査、解析することから始めなければならなかった。
「当時、渋谷の宮益坂の坂下にヘビ料理屋があってね。そこでヘビを売っているというので、すぐに買いにいきましたよ。1匹1500円のシマヘビを6、7匹買ってきたでしょうか」 と広瀬。
そして、人工芝生の上にシマヘビを解き放ち、その動きを熱心に観察し始めた。まず、広瀬はシマヘビを持った瞬間、腹の縁のところがスケート靴のエッジのような形になっていることに気付いた。ヘビの腹にあるウロコは前後方向に滑りやすい構造になっている。ところが、腹の縁は角張っておりこれがエッジの役割を果たしていたのだ。ヘビはスケート靴と同じ原理で推進力を得ていたのである。
また、筋肉の動きを詳しく調べるため、ヘビの身体に筋電計をいくつも装着してデータを取り、解析していった。時にはヘビと同じ形と重さの木製のブロックにヘビが脱皮したあとの抜け殻を貼り付け、引っ張る実験も行った。さらに、人工芝生の上に木片などの障害物を置いたりビー玉を敷き詰めたりし、ヘビがその上や中をどうやって移動するのかなども検証した。
加えて、ヘビはゆっくり進むときは胴体を浮かさないものの、素早く動くときだけ胴体を大きく曲げ、その一部を浮かして進んでいることもわかった。広瀬はそこには力学的な理由があるに違いないと考え、その解明に努めた。さらに、ヘビが移動する際に描くカーブについても、ある法則を持っていることを突き止めた。そして、その法則を数式化し、「サーペノイド曲線」と名付けた。
このように、ロボットを作るのに必要なヘビの身体のしくみを解明しながら、アルミニウムと鉄を使ってヘビ型ロボットを開発していったのだ。
「1972年12月26日に、完成したACMⅢを試運転したときの感激は今でも忘れられません。その様子はまさにヘビそのもので、機械がまるで柔らかい生き物のように動き始めたのです。私は一瞬にしてロボットに魅了されてしまいました」
広瀬はさらにヘビの観察とヘビ型ロボットの改良を続け、1976年、その成果を基に博士号を取得した。
その後も、研究室の学生らと共同で、障害物の多い場所で活躍する「ACM-R4」や、空気圧で動き、伸び縮みする「スリムスライム」などユニークなヘビ型ロボットを次々と開発していった。そして、その中の1つに、今後、原発事後現場での活躍が期待されているACM-R5があったのだ。
「開発当初は、水陸両用にすることで災害救助などでの適応範囲が広がるのではないかと考えていましたが、図らずも原発事故の後処理に有用であることが分かり、大変嬉しく思っています」
ヘビ型ロボットを応用しものをやんわりつかむ手のようなロボットや、しなやかに伸びて作業をしてくれる腕のようなロボットも開発。2008年には、日産の依頼を受け、これらのロボットを基に開発した車両の組立工場で作業員を支援するロボットを開発し、それでカルロス・ゴーン賞を受賞している
ヘビ型ロボットと並行して、足を使って階段などを上るロボットの開発にも着手した。ある時、ザトウグモという足の長いクモを見つけた広瀬は、そのメカニカルな動きに興味を抱き、このクモの参考に4本足のロボットの開発に取り組み始めた。1979年に完成させた2号機では、触覚センサーを搭載することで、階段を上まで転ばずに上ることに成功した。それがオハイオ州立大学の教授の目に止まり、1980年にはDARPA(国防高等研究計画局)のプロジェクトに参画することとなった。
さらに、国や企業の要請に応じて、対人地雷除去ロボットや惑星探査用ロボット、水中探査ロボット、配管内ロボットなど人が行けない場所や危険な場所に人の代わりに行って偵察や観測を行ったり、作業をしたりするロボットを次から次へと開発していった。その数は優に150台を超えるという。
それにしても次々に独自のアイデアを生み出す広瀬の源泉は一体どこにあるのだろうか。この質問に対して広瀬は淡々とこう答える。
「私の場合、運慶の話と同じで、湧いたイメージをそのまま形にしているという感じですね。逆にイメージが湧く瞬間がロボット研究の中で一番楽しいときなんです」
夏目漱石は小説「夢十夜」の中で、鎌倉時代に活躍した天才仏師の運慶について、こう記述している。それは、運慶が仁王像を彫っている姿を見ている主人公に対して隣の男が、「運慶は単に木の中に埋まっている仁王を掘り出しているだけだ」と教えたというものだ。
とはいえ、そんな広瀬でも最初に浮かんだイメージ通りのロボットが出来上がるということは稀だという。
「ロボットはシステムであるため、1つでも機能しない部分があれば完成しません。ほんの少しの修正のために、一から作り直すことも日常茶飯事です。それゆえ、失敗は数知れず。しかしながら、挫折をしたことは一度もありませんね。それは失敗したとき、ではどうすれば成功するのかというしか考えないからだと思います」 と広瀬。そして、この姿勢こそが新たな道を切り開いていくのだ。
一度完成したロボットでも、絶えず改良を繰り返している。そのため、十年以上にわたり開発を続けているロボットも少なくない。そんなロボットたちが研究室にはところ狭しと並べられている
「また、私は確かに最初ヘビやクモをモチーフにしてロボット開発を始めましたが、逆に、インスピレーションを受ける対象にはこだわってはいけないと考えています。何からインスピレーションを受けたかはどうでも良いことだからです。重要なのは、何のためにロボットを開発するのかという目的です。そのため、私の研究室にくる学生たちには、ロボット研究を通じて何を実現させたいのかを深く考えさせ、その方向性と目標を与えるようにしています」
例えば、中にはアイロンをかけることができるロボットを開発している研究者もいるが、人が衣類にアイロンをかけるのはシワを伸ばすためだ。それならば形状記憶繊維のように、アイロンが不要な生地を開発した方がスマートだというのが広瀬の考え方だ。そのため、単に人がやっていたことをロボットにやらせようという考えには手放しで賛成はできないと広瀬は言う。

さて、ロボットの研究者になるにはどのような能力が必要なのだろうか。それに対し広瀬はこう答える。
「数学や物理学など理論的な知識はもちろんのこと、子供の頃から工作などものつくりをやっていることが重要だと思っています。最大の理由は立体的に形と動きがイメージできるセンスが養えるからです。ところが、学生とイメージを共有しようと思っても中々共有できず、歯がゆい思いをすることがよくあります。挙句の果てには、『先生、数式を使って考えましょうよ』なんて言われてしまうんです」
広瀬自身、子供の頃は外で遊ぶよりも家に閉じこもって工作をして遊ぶことの方が好きな少年だった。時計の分解はもちろんのこと、ラジオなども手作りした。高校生時代には、家では風呂の水張り担当だったため、水が一定の高さまで溜まると笛が鳴る装置をあえて電子回路を使わずに開発したりした。
そのため、広瀬は、子供たちにものつくりの楽しさと重要性を知ってもらおうと、1997年から日本機械学会主催の「ロボットグランプリ」なども開催し、自ら組織運営委員長を務めている。
大岡山キャンパス石川台3号館にある「統合創造工房」の設立にも、広瀬は大きく貢献している。かつて、機械宇宙システム専攻は機械物理工学科という名前で、理論の研究が重視されており、ものつくりはどちらかというと軽んじられていた。しかし、両方の重要性を感じていた広瀬は学科に働きかけて募金活動を始め、古い建物を改装して工房を設置した。そして統合創造工房の一部にそれが引き継がれたのだ。現在では、「大道芸ロボットコンテスト」が開催されるなど創造性教育の拠点となっている。
その他、発明協会主催の「全国少年少女チャレンジ創造コンテスト」の委員長や、世の中の問題を解決できるトップエンジニアの育成を目的とする早稲田塾の「スーパーロボティクスプログラム」の教授を務めるなど子供から高校生、博士課程の大学院生に至るまで幅広い世代の後進の教育にも情熱を傾けている。
「42年間にわたり、ロボットの研究にまい進させていただいた東工大には心から感謝しています。とはいえ、退職後も休んではいられません。気持ちを新たに、社会に役立つロボットの研究開発と後進の育成に努めていきます」 そう語る広瀬の表情は充実感と使命感に満ち溢れていた。
広瀬 茂男(Shigeo Hirose)
1947年 |
東京都生まれ |
1976年 |
東京工業大学制御工学専攻博士課程修了。 機械物理学科助手。専門はロボット工学 |
1979年 |
東京工業大学 機械物理学科 助教授 |
1992年 |
東京工業大学 機械物理学科 教授 |
2011年 |
東京工業大学 大学院理工学研究科 卓越教授 |
2013年 |
東京工業大学 名誉教授 |
(1999年 IEEE Pioneer in Robotics and Automation Award、
2006年 紫綬褒章, 2009年 The Joseph Engelberger
Robotics Award など受賞)

スペシャルトピックスでは本学の教育研究の取組や人物、ニュース、イベントなど旬な話題を定期的な読み物としてピックアップしています。SPECIAL TOPICS GALLERY から過去のすべての記事をご覧いただけます。
2013年3月掲載