東工大ニュース
東工大ニュース
![]()
公開日:2018.12.26
東京工業大学 工学院 機械系の鈴森康一教授らは災害現場など厳しい環境でも動作するタフな油圧駆動型ロボット用アクチュエータ[用語1](力を生み出す装置)を開発し、その実用化の推進に向けて東工大発ベンチャー「株式会社H-MUSCLE(エイチマスル)」を設立しました。H-MUSCLEでは、商品のサンプル出荷を2019年2月より開始します。
現在のロボットの大部分は電気モータで駆動しますが、大出力で、衝撃に強く、悪環境でも動作するロボットの駆動には油圧アクチュエータが適しています。しかしながら、パワーショベルなど一般産業機械用に開発された油圧アクチュエータは、ロボット用としては大きくて重すぎるうえ、滑らかな動きや力の制御には適していませんでした。
今回開発した油圧アクチュエータは、こうした課題の解決を目指したもので、従来の電動モータに比べると格段に大きなパワーと耐衝撃・耐環境性を備えるとともに、従来の油圧アクチュエータに比べると、小型、高出力(f/m比[用語2])、滑らかな制御性を備えています。
この油圧アクチュエータは、「大きなパワーと頑丈な身体」、「良好な制御性」を兼ね備え、災害現場など過酷な環境でもタフに優しく仕事をこなすロボットの実現の道を拓くものです。

今回の成果は内閣府革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ![]() によるもので、東京工業大学、JPN株式会社、株式会社ブリヂストン、KYB株式会社に加え他大学と油圧機器関連企業が参加して、2014年より、タフなロボット用の油圧アクチュエータの研究開発を進めてきました。このImPACTの成果の実用化を促進するため、H-MUSCLEでは国内メーカに油圧シリンダと油圧モータのサンプル出荷を開始し、今後販売するアクチュエータの種類を拡大するとともに、用途開拓を進める計画です。
によるもので、東京工業大学、JPN株式会社、株式会社ブリヂストン、KYB株式会社に加え他大学と油圧機器関連企業が参加して、2014年より、タフなロボット用の油圧アクチュエータの研究開発を進めてきました。このImPACTの成果の実用化を促進するため、H-MUSCLEでは国内メーカに油圧シリンダと油圧モータのサンプル出荷を開始し、今後販売するアクチュエータの種類を拡大するとともに、用途開拓を進める計画です。
ImPACT「タフ・ロボティクス・チャレンジ」(2014-2018年度、プログラム・マネージャー 田所諭東北大学教授)では、極限の災害現場でもタフに動けるロボットの実現を目指して研究を進めてきました。その一環でロボットに特化した油圧アクチュエータとそのロボット応用に関する研究テーマが設定され、東京工業大学工学院の鈴森康一教授(ロボット工学、アクチュエータ工学)がリーダとなり、東京工業大学、岡山大学、立命館大学、JPN株式会社、株式会社ブリヂストン、KYB株式会社が参加、さらに専門性の高い技術を有する複数の企業の協力を得て、従来にない、小型、軽量、大出力、低摺動(しゅうどう)[用語3]の油圧ロボット用アクチュエータの開発に成功しました。
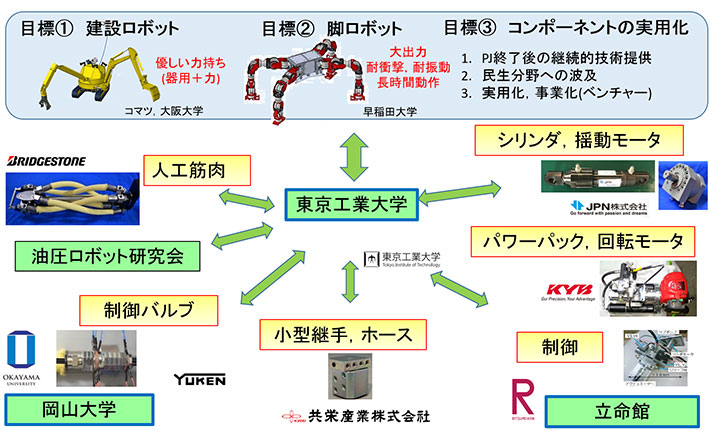
図1. ImPACTにおける油圧アクチュエータ研究開発体制
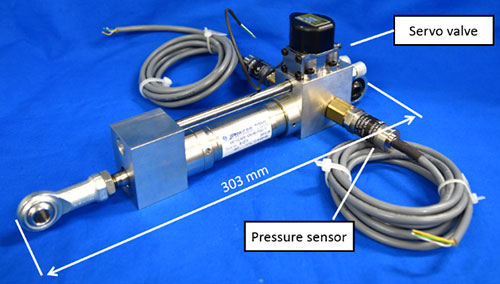
図2. 小型、軽量、低摺動シリンダの一例
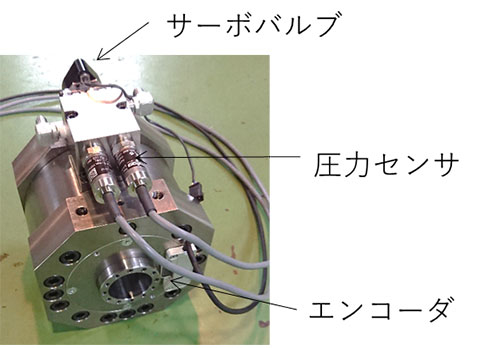
図3. 小型、軽量、低摺動モータの一例
今回開発した油圧アクチュエータは、既存の油圧アクチュエータに比べて下記の特長を有します。
日本工業規格(JIS)では内径35 mm以上のシリンダしか規定されていませんが、ロボットでは、さらに小型のシリンダが要求されます。H-MUSCLEでは小型シリンダの技術を有するJPN株式会社との共同により内径20 mm~30 mmのシリンダを開発し、提供します。(図4参照)
fは発生軸力、mはシリンダの自重です。ロボットでは、据え置き型の一般産業機械用以上に高f/m比が求められます。図は一例ですが、H-MUSCLEのシリンダは圧倒的に高い値を有します。(1)35 MPa圧による駆動、(2)チタン合金、マグネシウム合金、(3)設計の工夫がそれを可能にしました。(図4参照)
通常のJISシリンダに比べて格段に小さな作動圧で動作します。従来の油圧シリンダや油圧モータでは、ピストンとシリンダの間に油をシールする硬いパッキンが入っており、この摩擦が大きく、なめらかな動きや力のコントロールは行えませんでした。これに対して低摩擦のパッキンの採用と設計の工夫により、従来よりも1/10程度の低い摩擦を実現しました。これにより、従来の油圧ロボットでは難しかった精密な動きや力制御も可能になります。(図5参照)
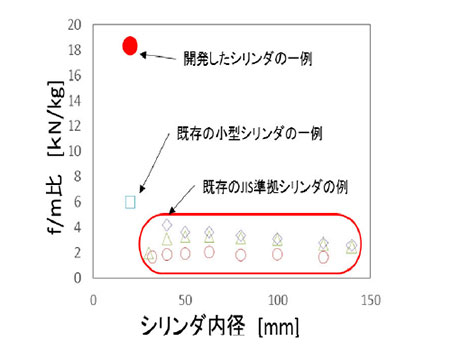
図4. 開発したシリンダと従来のシリンダとの比較
(横軸:シリンダ内径、縦軸:「力/自重」比)
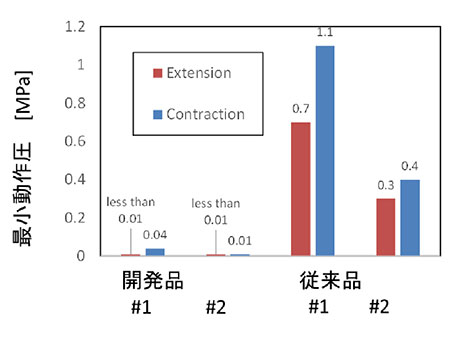
図5. 開発したシリンダと従来のシリンダとの比較
(駆動に必要な最小油圧)
ImPACTプログラムでは、開発した油圧アクチュエータの可能性を評価するために、これらを用いて種々のタフロボットを試作しています。
図6は、7軸の油圧ロボットアームです。本プロジェクトで早稲田大学と明治大学が中心となって開発している4脚ロボットとの特性を比較するために、ほぼ同じサイズで試作したものです。開発した7つの油圧モータから構成されます。図は厚さ30 mmのコンクリート板を3枚割っているデモンストレーションの様子です。
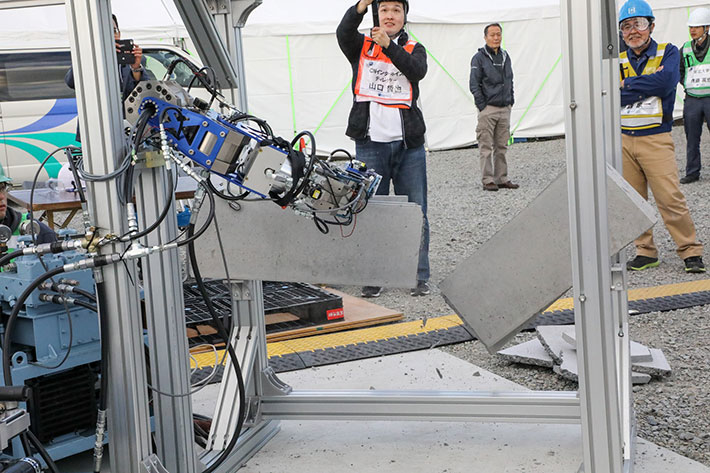
図6. 7軸油圧ロボットによる、大パワー、耐衝撃性デモンストレーション
図7は、コマツと大阪大学が中心になって開発を進めてきた建設ロボットです。2本のアームのうち小型のアームは、このプロジェクトで開発した低摺動の油圧シリンダで駆動され、細かな作業実現に一役買っています。また、他方のアームの先端には、開発した油圧アクチュエータを用いた油圧ハンドが搭載されています。4本の指を持ち、状況に応じて、ショベルモードとハンドモードの切り替えが行えます。ハンドモードでは様々な形状の物体の把持や、握る力を制御することが可能です。

図7. 建設ロボット※に搭載された低摺動油圧シリンダと形状可変ロボットハンド
(※ ImPACTでコマツ、大阪大学が中心になって開発されたロボット)
H-MUSCLEは研究成果の社会展開を目的として2018年10月17日に設立しました。2018年11月には東京工業大学発ベンチャーの称号を授与されました。
ImPACTのプログラムでは、油圧シリンダ、油圧モータのほか、油圧人工筋肉、油圧ポンプ、細径油圧ホース、小型油圧継手、小型制御バルブ、等、ロボットに適した小型、軽量、高性能の新しい油圧アクチュエータとその周辺機器を開発してきましたが、このうちまず、油圧シリンダと油圧モータを対象として出荷を始めます。
H-MUSCLEでは、顧客企業、東京工業大学、製造委託会社等と協力して、油圧アクチュエータの設計、開発、技術コンサルティング、用途開拓を進めます。油圧シリンダとモータの詳細設計、製造は、ImPACTで開発にあたったJPN株式会社(東京都大田区、代表取締役:日沖清弘)に業務委託します。今後、ImPACTで共同開発を行った企業各社の協力を求め、随時対象とする製品、技術を広げてゆく予定です。
小型、軽量、低摺動を特徴とするH-MUSCLEの油圧アクチュエータは、ロボット以外にも様々な用途の可能性があると考えています。ロボット以外の用途開拓についても積極的に取り組む計画です。
社名 : |
株式会社H-MUSCLE(エイチマスル) |
設立日 : |
2018年10月17日 |
所在地 : |
東京都大田区 |
事業内容 : |
油圧コンポーネントの設計、製造、販売、技術コンサルティング、研究開発 |
役員 : |
代表取締役 鈴森康一(東京工業大学 工学院 教授) 取締役 難波江裕之(東京工業大学 工学院 助教) 取締役 日沖清弘 |
用語説明
[用語1] アクチュエータ : モータ、油空圧シリンダ、人工筋肉、圧電素子等、動きや力を作りだす装置の総称。
[用語2] f/m比 : 直動動作するアクチュエータに対して、fは発生する力、mはアクチュエータの質量で、一般に、その比f/mが大きいほど、よいアクチュエータと言える。
[用語3] 低摺動 : 摩擦が少なく、滑らかな力の制御や精密な位置決めができること。
お問い合わせ先
株式会社H-MUSCLE
E-mail : contact@h-muscle.com
取材申し込み先
東京工業大学 広報・社会連携本部 広報・地域連携部門
E-mail : media@jim.titech.ac.jp
Tel : 03-5734-2975 / Fax : 03-5734-3661