東工大ニュース
東工大ニュース
![]()
12月25日、工学院 機械系の鈴森康一教授は、開発した油圧アクチュエータの記者説明会を、難波江裕之助教、株式会社JPN(ジェー・ピー・エヌ、以下、JPN)の日沖清弘代表取締役と設立した東工大発ベンチャー「株式会社 H-MUSCLE(エイチマスル、以下、H-MUSCLE)」とともに大岡山キャンパスにて開催しました。鈴森教授らが今回開発した技術は、災害現場など厳しい環境でも動作する油圧駆動型ロボット用アクチュエータ(力を生み出す装置)で、その実用化の推進を目指し、H-MUSCLEが設立されました。

H-MUSCLEの設立背景を説明する鈴森教授(左)、難波江助教(中央)、JPNの日沖代表取締役(右)
極限の災害現場でもへこたれず、タフに仕事ができる遠隔自律型の屋外ロボットの研究開発は、自然災害が頻発する日本の重点施策の1つとして、内閣府革新的研究開発推進プログラム(以下、ImPACT)「タフ・ロボティクス・チャレンジ」(2014-2018)にて、推進されてきました。
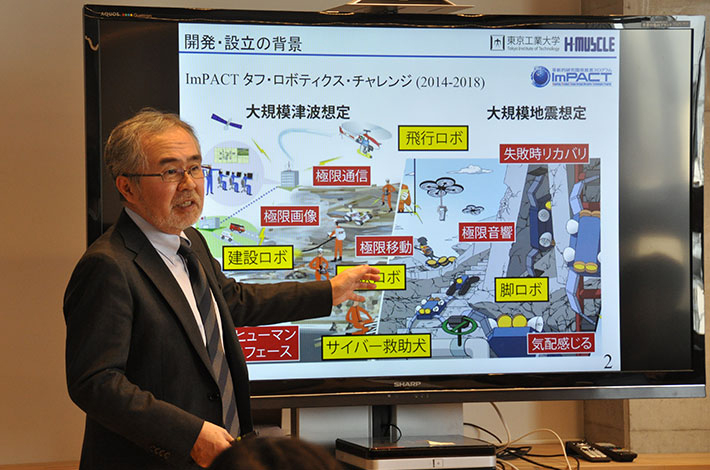
タフ・ロボティクス・チャレンジの概要説明
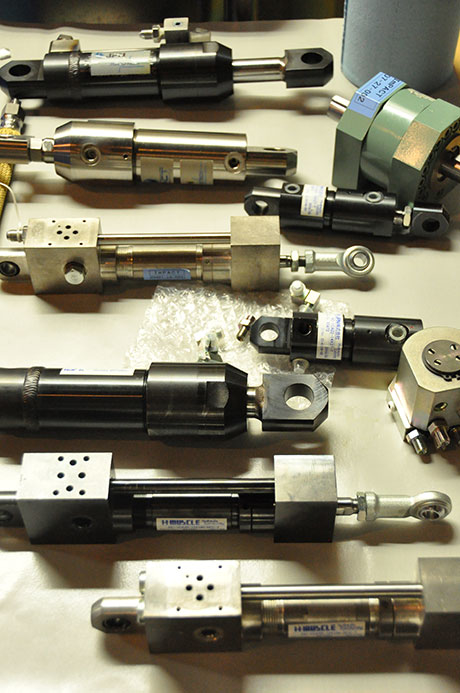
新開発のアクチュエータ試作品
鈴森教授はこのプログラムのうち、ロボットコンポーネントプロジェクトのリーダーとして、ロボットに特化した油圧アクチュエータとその応用の研究開発を進めてきました。パワフルで衝撃に強く、悪環境でも動作するロボットの駆動には、従来の多くのロボットに採用されている電気モータ製アクチュエータではなく、大きなパワーが出せる油圧アクチュエータが適しています。しかしながら、ショベルカーなど一般産業機械用に開発された既存の油圧アクチュエータは、ロボット用としては大きくて重すぎる上、滑らかな動きや力の制御には適していませんでした。
今回開発したロボット用油圧アクチュエータは、マグネシウム合金の使用など素材の工夫などにより、小型・軽量、かつ、パワフルで滑らかな動作を実現したものです。これらは、ImPACTに参加してきた多くの研究機関・企業などの協力を得て開発可能となりました。
記者説明会では、鈴森教授が、ロボット用の油圧アクチュエータ開発背景やH-MUSCLE設立趣旨の説明をしました。試作品を実際に手に取り、従来品との差異を体感してもらいました。記者からは、新開発のアクチュエータを実現したポイントや今後の事業展開に関する多くの質問を受けました。

開発したアクチュエータの滑らかな動きをデモする鈴森教授

記者説明会の様子
続いて記者会見場から実験室に場を変え、ロボットハンドと、脚ロボットのデモを行いました。最初に、建設ロボットのアームの先に取り付けられるハンドロボットを用いて、ショベルモードとハンドモードの切り替えを行いました。ハンドモードでは、4本の指を使い、複雑な形をした40 Kgのテトラポットや柔らかいゴムタイヤを持ち上げ、さらにその握力を変化させるなど、形状が一定でないものを掴み取るスマートな制御力と小型でパワフルな身体機能をデモンストレーションしました。次に、脚ロボットを用い、3 cm厚のコンクリート板3枚を重ねたものを一瞬で打ち砕きました。素早い動きと衝撃音で会場が一瞬静まりかえった後、会場は歓声で湧きたちました。デモンストレーション後も話は尽きず、大盛況の中、閉会しました。

ロボットハンド
ショベル、ハンドのモード変更が可能

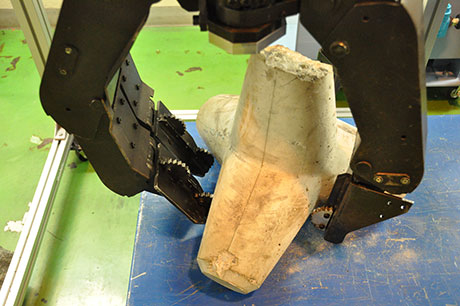
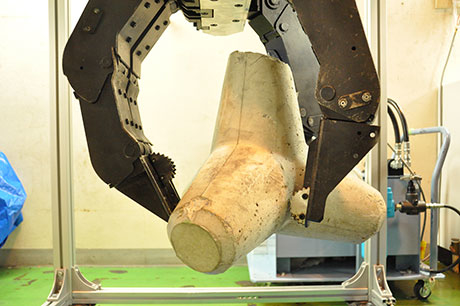
複雑な形状の40㎏のテトラポットを軽々つかむハンドロボット
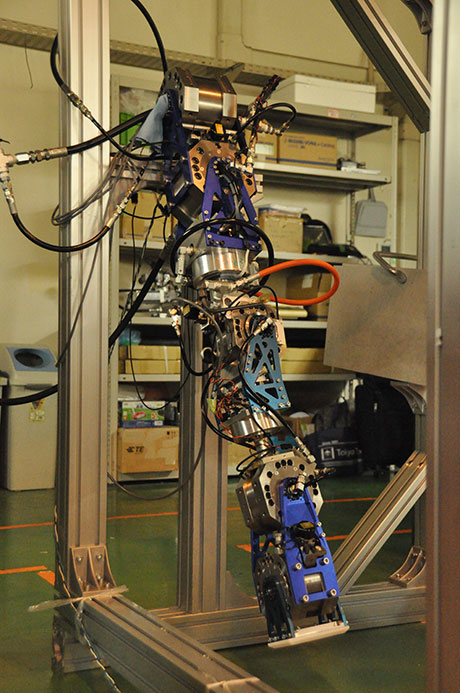
脚ロボット
油圧モータを使用することで、ロボットの素早い動きと稼働領域の拡大を実現
3枚重ねの9 ㎝厚のコンクリート板を一瞬で打ち砕く脚ロボット
衝撃に強い油圧モータを採用しているため、破砕後にロボットが壊れることはなく、作業を継続することができる

実際の災害現場で、過酷な環境にもへこたれず、タフに働き続けられるレスキューロボットの創生には、その動きを支えるコンポーネントの開発が重要です。ロボットは従来、電気モータで駆動しますが、シビアな環境で動きまわるロボットの駆動は得意ではありません。そこで、建設重機では一般的な油圧技術を取り込み、今までにない「小型・大出力・滑らかな制御」を可能としたレスキューロボットの開発を実現しました。今後はコンポーネントを標準化し、価格競争力の強化と、商品ラインナップの拡充を目指します。今回の取り組みが、未来のタフ・ロボティクスの礎となり、社会に大きく貢献するまでに育つには、さらなる技術開発の進展が必要です。そのための一層の努力をしていきます。