東工大ニュース
東工大ニュース
![]()
公開日:2019.10.08
北海道大学 大学院理学研究院の角五彰准教授、井上大介博士、佐田和己教授、岐阜大学 工学部 応用物理コースの新田高洋准教授、東京工業大学 情報理工学院のGreg Gutmann助教、小長谷明彦名誉教授、コロンビア大学 医用生体工学部のHenry Hess教授らの研究グループは、自走する約1億個の分子機械の集団運動を、単純な物理刺激で制御することに成功しました。
群れ(集団)で行動する鳥や魚、細胞などは様々なスケールで自発的にパターンを形成します。タンパク質からなる分子機械も、集団となることで様々なパターンを形成します。これらの分子機械は、電気や熱のエネルギーではなく、化学エネルギーで駆動するのが特徴です。集団運動する分子機械は、優れたエネルギー変換効率と高い比出力特性を有しているため、分子群ロボットや超小型 デバイスなどの動力源として期待されています。しかし、これまでそのような分子機械の群れのパターンを制御することは出来ていませんでした。
本研究では、自走する約1億個の分子機械に伸張や圧縮などの単純な物理刺激を加えることで、群れのパターンを制御できることを見出しました。また、この群れのパターンをかき乱しても、直ちに自己修復されることもわかりました。
本成果は、省エネルギーな小型デバイスの実現を前進させるだけでなく、研究グループが開発してきた分子群ロボット制御への応用も期待されます。
なお、北海道大学が集団運動する分子機械の制御法を考案・実証し、岐阜大学、東京工業大学、コロンビア大学がコンピューターシミュレーションなどによる理論構築を担当しました。
また、本研究成果は、2019年10月4日(金)公開のアメリカ化学会刊行ACS Nano誌に掲載されました。
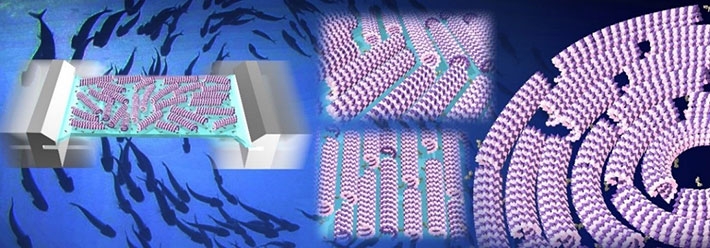
外部刺激による分子機械の集団運動制御のイメージ図
「分子機械」は、SF映画の中の用語でした。しかし、近年発展したナノテクノロジーによって様々な分子機械が実現され、さらに2016年には分子機械を設計・合成した欧米の研究者3名がノーベル賞を受賞し、現在注目を集めています。ただ、自走する分子機械についての研究はまだ新しい分野であり、体系的な学問もありません。
研究グループは、これらの分子機械に着目し、自発的に群れを形成する世界最小のロボット(分子群ロボット)を開発してきました(Nature Communications 2018, 9,453![]() )。これらの分子群ロボットは、キネシン/微小管[用語1]というタンパク質からなる分子機械によって駆動されています。この分子機械は、化学エネルギー(アデノシン三リン酸:ATP)を高効率に利用して動く特徴があります(単位重さあたりの出力が一般的な電磁モーターの20倍)。このように分子群ロボットの群れを利用することで、単体では成しえないような仕事をさせることができます。
)。これらの分子群ロボットは、キネシン/微小管[用語1]というタンパク質からなる分子機械によって駆動されています。この分子機械は、化学エネルギー(アデノシン三リン酸:ATP)を高効率に利用して動く特徴があります(単位重さあたりの出力が一般的な電磁モーターの20倍)。このように分子群ロボットの群れを利用することで、単体では成しえないような仕事をさせることができます。
しかし、分子群ロボットのサイズはマイクロメートルと小さく、分子群ロボットの群れを制御する方法論の確立が課題となっていました。本研究では、自走する約1億個の分子機械に伸張や圧縮などの物理刺激を加えることで、その集団運動を制御可能であることを世界にさきがけて実証しました。
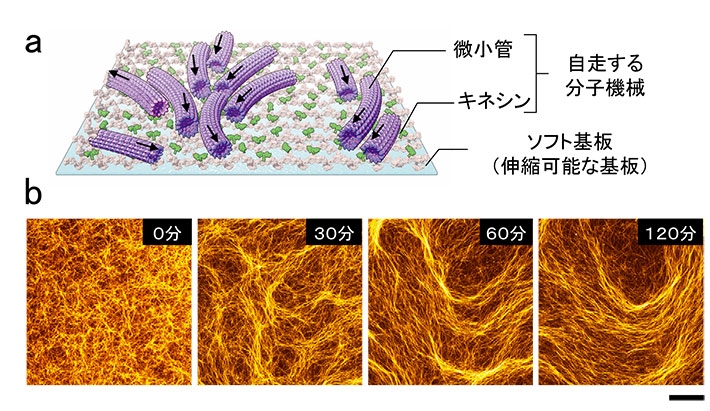
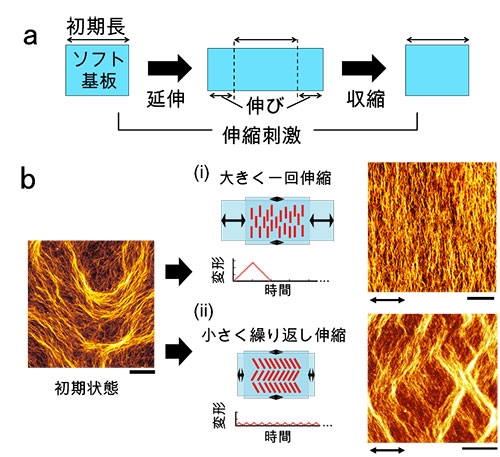
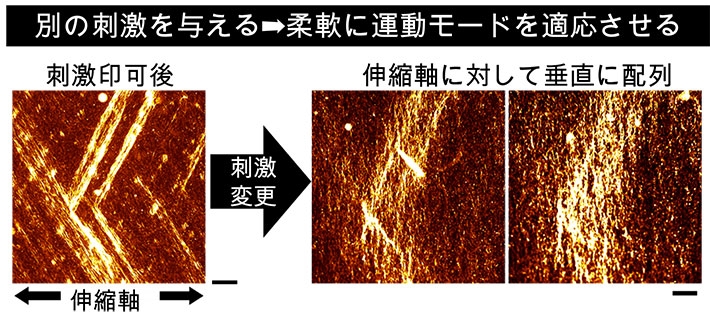
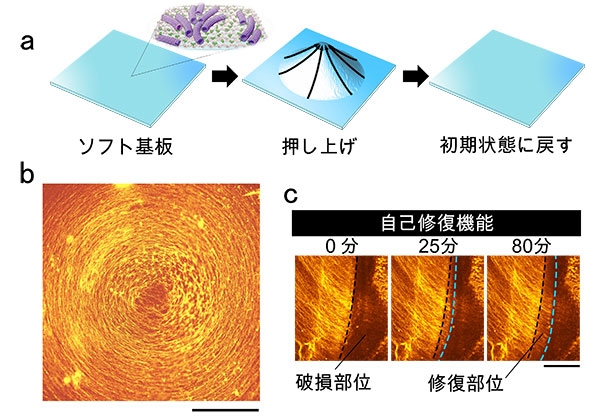
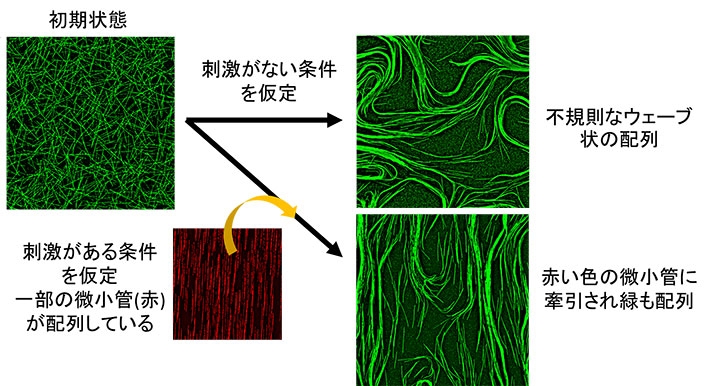
本研究で用いた分子機械は、バイオエンジニアリングにより作られたタンパク質「キネシン」と「微小管」から構成されています。伸縮可能な基板表面にキネシンを固定し、ATP存在下で微小管を基板上で自走させます(図1)。次に、この基板を伸縮させることで、基板表面で自走する約1億個の微小管に物理的な刺激を与えて微小管の運動方向を制御します。基板を1.3倍以上伸縮すると、約1億本の微小管のほぼ全てが伸縮方向に対して垂直に並び、基板を1.3倍以下で繰り返し伸縮すると、対角線方向に並んで運動することがわかりました(図2、3)。さらに、基板を放射線状に伸縮すると微小管が同心円状に並ぶことも見出しました(図4)。この微小管の運動パターンは、新たな物理刺激を与えることにより変調可能で、微小管の配列に欠陥が生じても自己修復されることも見出しました。また、シミュレーションにより、微小管の規則的な配列メカニズムは微小管の変形と関係があることや、微小管の集団運動が微小管の配列を促進していることもわかりました(図5)。
本研究成果は、集団運動する分子機械の学問体系の構築に貢献するだけでなく、化学エネルギーで高効率に動き、自己修復など優れた機能を持つ小型デバイスの実現や、研究グループが開発してきた分子群ロボット制御への応用にも期待が持たれます。
本研究は、文部科学省科学研究費助成事業新学術領域研究「分子ロボティクス」(24104004)、「発動分子科学」(18H05423)、基盤研究(A)(18H03673)及び日本学術振興会特別研究員奨励費(14J02648)の支援を受けて行われました。
用語説明
[用語1] キネシン/微小管 : 分子機械は、遺伝子工学的に作られたモーター「キネシン」と繊維状タンパク質の「微小管」がセットになって動くことで機能する。キネシンと微小管は、細胞内における物質輸送システムなどを構築する細胞の動力。微小管は直径25 nm、長さ約数十μ mの細胞内に存在する非常に細い繊維(図1)(1 nmは10億分の1 m、1μ mは100万分の1 m。参考:髪の毛の直径が60~100 μmで、微小管は髪の毛の3,000分の1程度の太さ)。本研究で用いられたキネシンは、全長が15 nm程度のタンパク質で、2つの微小管結合部位をもつ。この微小管結合部位が、生物燃料であるATPを消費して交互に微小管に結合することで、微小管表面を二足歩行する。
論文情報
掲載誌 : |
ACS Nano(アメリカ化学会の専門誌) |
論文タイトル : |
Adaptation of Patterns of Motile Filaments under Dynamic Boundary Conditions(動的境界条件下における運動性フィラメントのパターン適応) |
著者 : |
井上大介1、Greg Gutmann2、新田高洋3、Arif Md. Rashedul Kabir1、小長谷明彦2、徳楽清孝4, 佐田和己1、Henry Hess5、角五彰1 |
所属 : |
1北海道大学 大学院理学研究院 2東京工業 大学情報理工学院 3岐阜大学 工学部応用物理コース 4室蘭工業大学 大学院工学研究科 5コロンビア大学 医用生体工学部 |
DOI : |
|
公表日 : |
2019年10月4日(金)(オンライン公開) |
お問い合わせ先
北海道大学 大学院理学研究院 化学部門 准教授 角五彰
E-mail : kakugo@sci.hokudai.ac.jp
Tel : 011-706-3474 / Fax : 011-706-3474
岐阜大学 工学部 応用物理コース 准教授 新田高洋
E-mail : nittat@gifu-u.ac.jp
Tel : 058-293-2551 / Fax : 058-293-2415
東京工業大学 情報理工学院 名誉教授 小長谷明彦
E-mail : kona@c.titech.ac.jp
Tel : 045-924-5655 / Fax : 045-924-5655
配信元
北海道大学 総務企画部 広報課
E-mail : kouhou@jimu.hokudai.ac.jp
Tel : 011-706-2610 / Fax : 011-706-2092
岐阜大学 総合企画部 総務課 広報室
E-mail : kohositu@gifu-u.ac.jp
Tel : 058-293-3377 / Fax : 058-293-2021
配信元 及び 取材申し込み先
東京工業大学 広報・社会連携本部 広報・地域連携部門
E-mail : media@jim.titech.ac.jp
Tel : 03-5734-2975 / Fax : 03-5734-3661