東工大ニュース
東工大ニュース
![]()

ロボコンの舞台となるグレートドームを持つMITの建物
世界からロボット工学を学ぶ学生が集まるIDCロボットコンテスト大学国際交流大会2019(以下、IDCロボコン)が7月29日から8月9日にかけて米国のマサチューセッツ工科大学(MIT)で行われ、東工大の学生4名も参加しました。今回は大会設立から30周年の記念大会となり、10ヵ国から大学生54名が参加しました。初対面の学生たちは出身国や言葉、文化の違いを越えた11の混成チームに分かれてロボットの設計・製作を競いました。最終日は、アポロ11号の月面着陸50周年にちなんだ“Moonshot”(ムーンショット)をテーマにした競技を行い、東工大生が加わったチームが優勝しました。
IDC(International Design Contest)ロボコンは1990年、東工大とMITの共催で始まり、毎年、世界各地の大学で開かれます。2018年は東工大が会場となりました。今年の参加国は日本、米国、メキシコ、ブラジル、韓国、中国、タイ、シンガポール、インド、エジプトの10ヵ国でした。
各国の参加人数は次の通りです。なお、エジプトからの参加者が多いのは、MITとエジプトがハンズオン教育に関するスキル移転協定を今年から結んだためです。
日本 : 東工大4名、東京電機大学6名
米国 : MIT2名
メキシコ : メキシコ工科大学2名
ブラジル : サンパウロ大学2名
韓国 : ソウル大学5名
中国 : 清華大学3名、上海交通大学3名、浙江大学4名
タイ : タイ選抜5名
シンガポール : シンガポール工科・デザイン大学2名
インド : アムリタ大学4名
エジプト : エジプト選抜12名
東工大からは次の4名が参加しました。
木村陽太(工学院 システム制御系)
小泉光(工学院 システム制御系)
高橋啓太(工学院 システム制御系)
畑中倫也(工学院 システム制御系)

MITのフレイ教授の歓迎スピーチ
初日には開会式が行われ、ホスト大学のMITを代表してダン・フレイ(Dan Frey)教授より歓迎のスピーチがありました。その後、くじ引きによって11の混成チームが結成され、ルールの発表がありました。4~5名で構成された各チームにはブルー、オレンジなど色の名前がつき、メンバーはチーム名の色のTシャツを着ました。ルール発表後、各チームは早速、ロボットの設計を始めました。
今回のゲームのテーマは“Moonshot”で、コンテストフィールド(図1)は月面、月着陸船(Luna Module:LM)、旗を立てる巨石棚、APS(Ascent Propulsion System、月着陸船用上昇エンジン)充電器、アンオブタニウム(Unobtainium、入手不可能を意味する架空の素材)、月の石からなっています。中央手前にある三角形の領域は共有領域ですが、その左右はそれぞれのチームの領域で対戦相手のロボットは入ることができません。また、各チームの領域の一番手前には、月面に固定された月の石が1つあります。得点の方法は大きく分けて次の7つで、さらに達成の度合いによって得点が変わります。
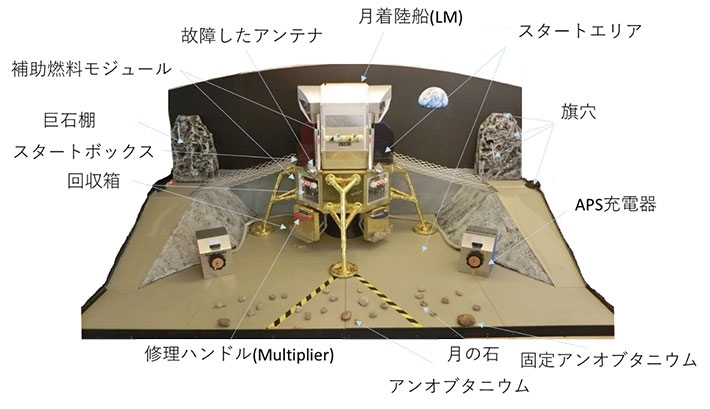
図1. コンテストフィールド
ゲームの時間は150秒で、最初の30秒間は自律モードで動かなければなりません。この時間内の得点は2倍になります。その後の120秒間は無線による遠隔操作で動かすこともできます。150秒の短い競技時間の中で、7通り全ての得点を得ることは困難なため、各チームはどの得点を目指すかを十分に考えてマシンを設計する必要があります。
各動作の得点の詳細は以下の通りです。
種類 |
下回収箱 |
上回収箱 |
スタートボックス |
|---|---|---|---|
月の石 |
5 |
15 |
10 |
アンオブタニム |
15 |
45 |
25 |

アンテナの角度に応じて点数に乗算されます
各チームは基本的には何台でもロボットを製作することができますが、使って良いのは与えられた材料だけです。ゲームスタート時には、LMのスタートエリアから出発するものは10インチ立方、月面のスタートエリアから出発するものは16インチ立方に収まっていなければなりません。

アイデアプレゼンテーションの様子
3日目の午後に、各チームがインストラクターの前でロボットのアイデアを披露するアイデアプレゼンテーションが行われました。ここでは披露したアイデアに対して、インストラクターからロボットの改良点などのアドバイスがもらえます。中には、LMと巨石棚の間に渡したブリッジを通って旗を旗穴に立て、ブリッジに戻って腕を反転して下に伸ばし、下のロボットから月の石をもらってLMのスタートエリアに持って行くというユニークなアイデアのロボットもありました。
大会期間はわずか12日間なので、参加学生は連日、ロボットの製作や動作の調整に懸命に取り組んでいました。
製作されたロボットを調整するアクアチーム
プログラミングとマシンの調整を行うイエローチーム
最終日8月9日の競技会では、まず11チームを3つのリーグに分けて総当たり戦を行い、得点の一番低いチームが予選敗退となります。勝ち残った8チームはトーナメントで優勝チームを決します。リーグ戦で敗退したのはテラコッタ、ダークグリーン、アクアの3チームでした。テラコッタチームはリーグ戦で唯一アンテナを上げることに成功しましたが、総得点で敗退となり残念でした。どのチームもスロープを転落しないように操縦して素早く上ることに苦労していました。確実に旗の得点を得て、さらに月の石を多くLMに運搬することができるロボットを作成したブルーチームとマロンチームが勝ち上がり、決勝戦で対決しました。決勝戦では、ブルーチームが多くの月の石を集めてLMに戻り優勝しました。ブルーチームには東工大の高橋啓太さんが、マロンチームには東工大の畑中倫也さんがいました。
表彰式に先立ち、IDCロボコンの創始者の1人であるハリー・ウエスト博士から、IDCがどのように始まり、30年にわたってどう発展してきたかの説明がありました。

真剣な表情でロボットを操縦する選手

IDCロボコンの成り立ちを話す創始者の一人のウエスト博士
優勝したブルーチームにはウエスト博士より、MITのマスコットであるビーバーを象った優勝メダルが贈られました。
また、マロンチームには準優勝のメダルが手渡されました。
優勝メダルを掛けて喜ぶブルーチーム(中央が高橋さん)

準優勝のマロンチーム(右から2番目が畑中さん)
コンテスト終了後は参加者全員で記念撮影をした後、さよならパーティが行われました。さよならパーティでは、恒例となっている国ごとのパフォーマンスが披露され、日本の学生はソーラン節のダンス・パフォーマンスを演じました。また、エジプトの学生とインストラクターによって、伝統的なダンスが披露されました。

参加者全員での記念写真

さよならパーティでエジプトの伝統的踊りを披露する
学生とインストラクター
今年のIDCロボコンは、例年通り各国の学生が言葉や文化の壁を乗り越えてアイデアや実現方法について熱い議論を戦わせる、という貴重な経験をしました。MITで開かれた30周年記念大会となり、さらに国際的な経験ができたようです。
2020年は中国・北京の清華大学で、2021年はエジプト・カイロのアイン・シャムス大学で開催される予定です。
世界10ヵ国のトップ大学の学生が、混成チームをつくりマシンデザインを行うIDCロボコンは、他に類を見ないユニークなプロジェクトです。
より詳しい報告は、以下のIDCロボコン公式ホームページからご覧になれます。