東工大ニュース
東工大ニュース
![]()
公開日:2018.07.05
国立大学法人 筑波大学 体育系 高木英樹教授、成田健造(大学院生)、国立大学法人 東京工業大学 工学院 システム制御系の中島求教授らの研究グループは、筑波大学の実験用回流水槽を用いて、泳法を限定することなく、任意の速度で泳いでいる泳者に作用する抵抗力を推定する方法を開発し、新たな切り口でクロール泳の抵抗問題の解明に取り組みました。
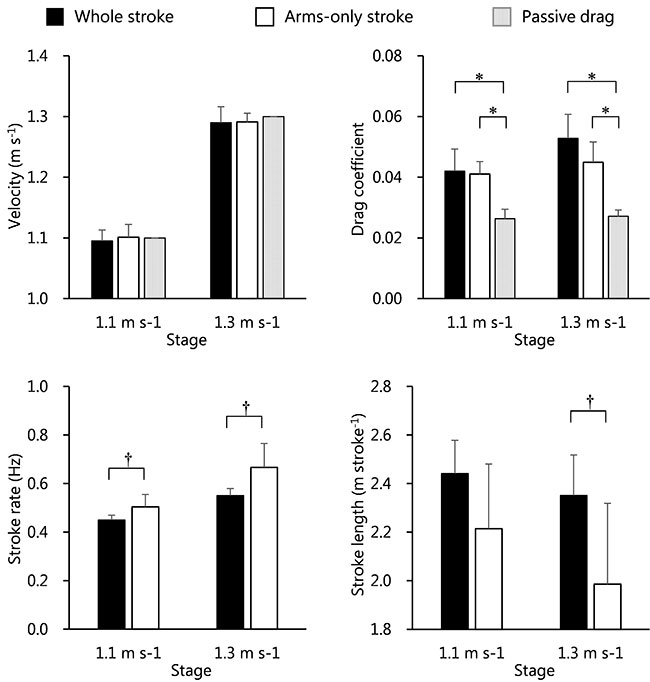
これまで、クロール泳のキック動作の役割に関しては、水平姿勢を保って抵抗低減には貢献しているが、推進力として貢献しているかについては統一した見解が得られていませんでした。その理由として、そもそも四肢を駆動させて自己推進しているスイマーに作用する抵抗を計測する方法が確立されておらず、体を一直線に伸ばした姿勢(けのび姿勢)時の静的抵抗や上肢だけでクロール泳を行う(プル泳)時の動的抵抗を測定するに留まっていました。しかし独自に開発した測定システムを用いることで、けのび姿勢時の静的抵抗、プル泳時の動的抵抗に加え、上肢と下肢の両方を使って泳いだ時の動的抵抗を同一システムで計測することが可能となり、それらの値を比較検討することにより、初めてキック動作の役割の解明が可能となりました。その結果、クロール泳のキック動作は低速域(1.1 m/s)では推進力として貢献していましたが、1.3 m/sを超えるあたりから抵抗となる可能性が明らかとなりました。以上のことから、速く泳ぐためには上肢のストローク頻度を増加させる必要がありますが、上肢と下肢の動作は連動しているので、必然的に下肢のキック動作の頻度も増加せざるを得ず、抵抗要素の増大につながることが予想されます。この抵抗増加をいかにして抑えられるかが、速く泳ぐための鍵となることが示唆されます。
本研究成果は、バイオメカニクス分野のトップジャーナルであるJournal of Biomechanicsにおいて6月15日に先行公開されました。
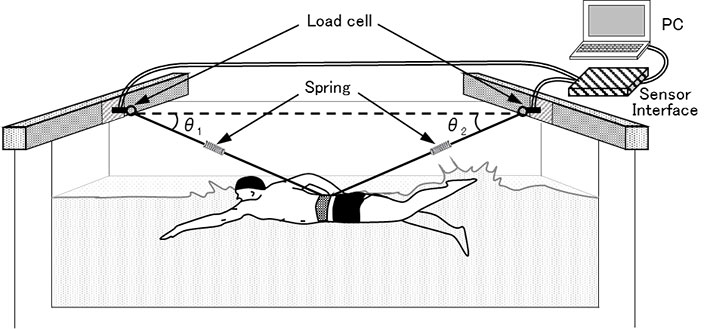
泳法に関わらず、任意の速度で自己推進しているスイマーの抵抗を正確に測定することは、水泳研究の分野においては古くて新しい問題であり、様々な方法論が試されてきました。古くは100年以上前に、スイマーをボートで牽引しながら抵抗を測定しようとする試みが行われたり、ドーナツ型の水路内でスイマーに様々な負荷をかけながら泳がせた時の酸素摂取量から抵抗を推定しようとするなど、世界中の研究者が知恵を絞り多種多様なアプローチが行われてきました。しかし、どれも一長一短で決定打がないという状態でした。そのような状況の中、本研究グループは、実験用回流水槽を用い、ある任意の流速においてクロール泳を行った時の泳ぎのテンポをスイマーに記憶させ、そのテンポを維持したまま、流速を様々に変化させた場合にスイマーに作用する力を測定し、その測定値から自己推進している時の抵抗を推定する方法を考案しました(図1参照)。本測定法を用いることで、速く泳ぐために最も重要な要因である自己推進時の抵抗について、ようやく客観的なデータに基づいて議論できるようになりました。
本研究ではクロール泳時における下肢のキック動作に注目し、キック動作が推進力として貢献しているのかどうかについて検討しました。これまで、キック動作に関しては、何もしなければ沈んでしまう下肢を持ち上げ、水平に近い姿勢を取るために必須で、抵抗低減には寄与していると考えられていました。しかし、進行方向に対して上下に運動する下肢が推進に貢献しているかについては、一定の見解を得られていませんでした。そこで本研究では、新たな測定方法を用いてキック動作の役割について検討したところ、低速域では抵抗にならず推進力として貢献しているが、1.3 m/sの中速域あたりから抵抗となり始め、さらに泳速度を高めるとかなりの抵抗になる可能性が示唆されました。これは我々の先行研究において、上肢と下肢の両方を使ったクロール泳の自己推進時抵抗が、これまでの定説(泳速度の2乗に比例)を覆し、実は泳速度の3乗に比例して増大することと深く関連しているものと思われます。つまりクロール泳で泳速度を上げるためには、抵抗増大につながるとしてもキックを打たざるを得ず、それが結果的に泳速度の3乗に比例して抵抗が増加するという現象を生んでいるものと思われます。よって速く泳ぐためには、推進力の大半を生んでいる上肢による推進力の増大をはかりつつ、キック動作の抵抗をいかに低減できるかが技術的なキーポイントとなります。
今後は本測定法を用いて、諸外国選手に比べパワーで劣る日本人スイマーが苦手とする自由形短距離種目において、高い技術を活かし、推進力の向上をはかりつつもキック動作による抵抗力低減の実現や、長距離種目でのキック動作の効率的な利用によるパフォーマンスの向上に関する方策を提案できる研究を推進します。
用語説明
[用語1] 抵抗問題 : スイマーが水面付近を泳いだ時、スイマーの体型に依存する形状抵抗(圧力抵抗とも言う)、水と体表面が接する部分に生じる摩擦抵抗、そして波がおきてスイマーを押し戻す方向に作用する造波抵抗などが生じますが、ここではこれらすべての抵抗を合わせた力を抵抗と呼んでいます。
論文情報
掲載誌 : |
Journal of Biomechanics |
論文タイトル : |
Effect of leg kick on active drag in front-crawl swimming: comparison of whole stroke and arms-only stroke during front-crawl and the streamlined position |
著者 : |
Kenzo Narita、 Motomu Nakashima and Hideki Takagi |
DOI : |
お問い合わせ先
筑波大学 体育系
教授 高木英樹
E-mail : takagi.hideki.ga@u.tsukuba.ac.jp
Tel :029-853-6330
東京工業大学 工学院 システム制御系
教授 中島求
E-mail : motomu@sc.e.titech.ac.jp
Tel :03-5734-2586
取材申し込み先
東京工業大学 広報・社会連携本部 広報・地域連携部門
Email : media@jim.titech.ac.jp
Tel : 03-5734-2975 / Fax : 03-5734-3661