東工大ニュース
東工大ニュース
![]()
東京工業大学の公認サークル、ロボット技術研究会(以下、ロ技研)の水中ロボットチーム、アクア研が7月12日横浜市みなとみらいのシーカヤックパークで行われた「海洋ロボット夜の祭典」でBest Performance Award(最優秀パフォーマンス賞)を受賞しました。
パフォーマンスを行ったロボットKurione2(左)とKurione3
「海洋ロボット夜の祭典」は、7月9日~14日にパシフィコ横浜で行われた国際会議IFAC WC 2023※ の海洋ロボットおよび制御技術の周知を目的とした市民向けフォーラムの公開イベントです。1,000人余りの観客の中、海洋技術の関連企業・団体からの出展、ロボットの海上パフォーマンスが行われました。
IFAC WC:International Federation of Automatic Control World Congres。3年毎に行われる自動制御に関する学会で、日本での開催は約40年ぶり。
通常の海洋ロボットのイベントでは、ロボットの性能(どの深さまで潜れるか、波に負けないパワーがあるか、操縦やメンテナンスは簡単かなど)の技術的な項目が問われますが、本イベントでは「海中技術に詳しくない人を、10分間どれだけ楽しませることができるか」が重要なポイントでした。
今回使用したロボットは2022年11月に沖縄海洋ロボコンに出場し敢闘賞を受賞した水中ロボット「Kurione2」と、それをベースに新たに開発した「Kurione3」の2台(以下、Kurione)で、音楽に合わせた演技と技術解説を組み合わせたパフォーマンスを行いました。
夜間イベントのため、KurioneにはフルカラーのテープLEDを施され、曲に合わせて色を制御する華やかな演出、さらに見ごたえのあるパフォーマンスを目指し、技術的に最も苦戦した噴水機能の搭載を実現しました。
噴水機能は、モーターで羽根車を回して水を噴き上げる機構で、高さ3 m程の噴水を出す遠心ポンプが流体力学に基づいて設計されました。モーターは海水に触れると壊れるため、海中のプロペラとの間に、動力を伝えつつも海水が入らないようにする工夫が必要です。海水の漏れるリスクを最小限にするために、モーター側とプロペラ側のそれぞれの回転軸に磁石を取り付け、両方の磁力により回転の力を伝えるマグネットカップリングという機構が用いられました。磁力は、間にアクリル板などの物体が入っても伝わるので、モーターを海水から完全に遮ることができます(図1)。
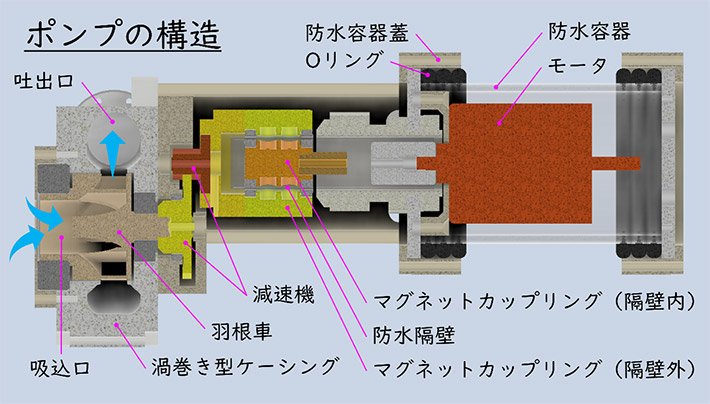
図1. Kurioneで用いられた噴水機構
原理は簡単ですが、苦戦する原因になったのが“損失”です。モーターの回転を磁力で伝えるので、磁石同士の距離が離れると磁力が小さくなり、水を噴き上げる力も小さくなります。そのためモーター側の磁石、モーターを海水から守る容器、プロペラ側の磁石の3つがなるべく近くなるように設計する必要がありますが、これらの距離が近いと、加工の精度や回転による振動によって磁石が容器に接触し、摩擦力による損失が発生します。また、海水をどのように取り込むかによっても、損失が大きく変化します。
損失が発生すると、水を噴く力が弱まるだけでなく、モーターに大きな電流が流れて回路の破損につながります。回転軸の取り付け方法や噴水の位置決めは、試行錯誤の結果、可能な限り損失を減らした噴水機構が実現できました。
また、今回はパフォーマンスの練習も大きな課題となっており、ロボットの動きを曲に合わせるための操作を覚えるのはもちろんのこと、暗い海で2台を同時に動かすために、操縦者同士の連携も重要でした。
パフォーマンスを行うシーカヤックパークは25 mプールよりも広く、同等の広さがある場所で練習する機会がほぼないため、仮想フィールドでロボットの動きを再現するシミュレーションを新たに構築しました(図2)。実際にロボットを動かす環境がなくても操縦練習が行えるため、演技の修正や操縦タイミングのすり合わせを入念に行うことが可能となりました。
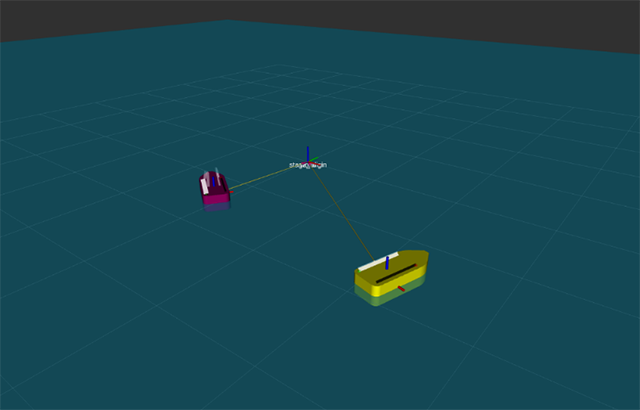
図2. 開発した演技シミュレーション(赤と黄色のオブジェクトがロボット)
演技シミュレーションを用いた操縦練習
噴水パフォーマンスでは、Kurioneが水を噴き上げた瞬間には観客から歓声が上がる場面もありました。
LEDと噴水を組み合わせた立体的な演出と演技の完成度が本受賞につながりました。

Kurione2とKurione3によるパフォーマンス(撮影:梅村建太郎)
私は演出およびシミュレーションの制作を担当しました。ロボットを主役に、いかに観客を10分間楽しませることができるかという課題に対して、これまでロボットによる演技という例があまりなかったため、必要機材含め検討をしました。中学、高校で取り組んだ演劇の経験を基にパフォーマンスを考え、さらに練習をする必要を感じてシミュレーション環境を構築しました。ロボット技術研究会の「ないものは作る」の精神の下、取り組むことができました。
当日、観客から歓声が上がったときはうれしさとともに、本番直前まであきらめずに機体を作り続けた仲間に感謝の気持ちでいっぱいになりました。「海洋ロボットと演技」という新たな融合の一歩を踏み出せたと思います。
私はチーム内でロボットの制御を担当し、サークルとして初めてとなる2台のロボットの制御に挑戦しました。2台の同期制御は困難な課題でしたが、メンバーと協力し実現することができました。
水中ロボットは一般的にはマイナーな分野であり、これまで人々の目に触れる機会は限られていました。しかし、今回はIFAC WC 2023内でのイベントということもあり、海外の方々を含む数百人もの観客に成果を披露することができました。こんなにも多くの方に私たちのロボットを見てもらえたことは、本当にうれしく感慨深いものでした。この機会をくださった関係者の皆様に、この場を借りて深く御礼申し上げます。

受賞に喜ぶロ技研のメンバー(下段左から樋本耀さん、内河慶輔さん)

Best Performance Award 賞状