大学院で学びたい方
大学院で学びたい方
![]()
![]()

他大学の文系学部から東工大の大学院に理転された経歴を持ち、人工知能(AI)を軸に新しい社会づくりの場で活躍されている石山洸さん。
ロボティクス分野において幅広い研究と開発を進め、人工筋肉など新しいロボットや機構の実現に取り組む鈴森康一教授。
時代とともに進化を続けるロボットとAIは、今後どのように交わり、人間の明るい未来を切り拓いていくのか。
お二方の考えを語り合っていただきました。
(対談日:2018年6月7日/大岡山キャンパスにて)
石山今日はお招きいただきありがとうございます。こうしてキャンパスを訪れると大学院生だった頃の懐かしい雰囲気を感じます。

鈴森文系の学部生から東工大の修士課程へ進むのはとても大変ですよね。相当な苦労があったかと思います。
石山大学2年のときに起きた9.11でアメリカに興味を持ち、渡米を考えたがお金がない。そこで偶然目にしたカーネギーメロン大学のプログラミングコンテストの出場権を手に入れればアメリカに行けると思い、必死でJavaを覚えました。無事出場できたのですが、そこで東工大の出口弘先生に出会ったんです。先生は理学と経済学の両方の博士号をお持ちで、研究室に誘われたのが理転のきっかけでした。ただ、入学には数学が必須です。大学の一般教養の先生に弟子入りして通常授業終了後に毎晩通いました。まず微積分と線形代数を完璧にするキャッチアップが大変でしたね。
鈴森石山さんにとって、出口先生の研究室が自分の研究を進めるちょうどよい場所だったのですね。東工大時代は何の研究をされていたのですか?
石山主にマルチエージェントシミュレーションをやっていました。もともと社会科学系のバックグラウンドがあり、コンピュータサイエンスを活用したら社会科学はもっとよくなるんじゃないかと思ったんです。当時はビッグデータという言葉もなく、エージェントベースシミュレーション※1から出てきたデータの解析しかできませんでした。AIといっても外の世界に閉じた研究が多かったです。
鈴森インターネットが台頭しはじめた時代ですね。今はビッグデータを活用できるようになりましたから、たとえば社会全体がシミュレーターといえそうですね。
石山おっしゃる通りです。実際にプロダクトをつくってアプローチすると社会の状態や反応が変わって、結果のデータを見ながらPDCAサイクルを回すことができます。学生時代の研究をさらに広げ、その延長線上で社会にインパクトを与えることができるようになってきました。
鈴森現在にまでつながるビジョンを、学生のときすでにご自分で思いつかれていたというのはすごいですね。
石山とんでもないです。当時の知能システム科学専攻では複雑系を研究していたので、ミクロ経済とマクロ経済の現象をモデルとしてつなげようと挑戦していました。データが取れる今では、両方のデータを結びつけて解析することができます。
鈴森今のお仕事に通じると思いますが、たとえばどのような領域に活かされているのでしょう?
石山介護へのAIの活用です。事例としては、認知症の方に対して見る、話す、触れるなどのケアを行うと症状がどう変化するか、といったことが定量的に計れるようになってきました。医療の世界にはデータに基づいた科学的根拠がありますが、ケアの世界はそうではありません。データが取れず動画や画像自体を解析する方法もなかった。それがディープラーニングなどで解析が進むようになった今、AIを使って介護の世界に科学の観点を導入できるようになってきました。症状や要介護度の変化に応じて、社会保障費や効用関数がどう変わるのかもつながって見えるわけです。学生時代に理論的に考えてやりたかったことが、現実の社会で実践できるようになってきたことを感じますね。
鈴森理系の中でも電気電子やメカトロニクスはコンピュータサイエンスに近い領域ですよね。そこから医科学系やその先の社会科学系の経済学につながって、一番遠くには文学系があるわけですが、石山さんご自身の立ち位置は理系か文系か、どういう認識なんですか? どちらとも区別をつけないというのが正解なんでしょうけども。
石山そうですね…。コンピュータサイエンスと経済学をつなげることからはじまり、今は自分の知識をケアの世界や医学に結びつけるために僕も勉強の日々です。これから社会的なインパクトを生み出すには、理系文系に関わらずダブルやトリプルのディグリーを目指す学習の必要性が高まっていると感じています。AIの人材育成でも、コンピュータサイエンスや機械学習、ロボティクスも含めて、AIと親和性の高い分野から段階的に学習できる機会を学生に対して大学側が用意していったらいいと思いますね。
鈴森理系と文系がつながっていく体制は、まだ実際の社会では整っていませんね。異分野の学術融合がもっと必要だと思います。たとえば知能ロボットだけを見ても、情報科学(知能)と機械(ロボット)の各領域がクリアに分かれた上で今の産業界は成り立っています。本来はもっと融合していかなければならないのに、それぞれのエンジニアが分業しているのが現実です。
石山AI側にはロボティクスと融合させたいという需要が多いです。ただし、そこには融合させる目的を踏まえたもう一つの軸が必要かなと。たとえば「ロボット×AI」に「介護」という軸を加えると具体的なゴールが明確になりますし、そういった方向性で設計することが重要だと思います。
鈴森僕も今は機械(ロボット)の立場で研究しています。最近の工場の仕分けロボなどは、AIやディープラーニングと結びついて速度も精度も高い動きを実現していますね。現在のロボットを人間の日常に導入しようとするとうまくいきません。というのも、ロボットはソフトウェアもメカニズムも緻密に正確に組んでいくもので、速く正しく動かすことは得意だけれども、今のプログラミングだと想定外のことが起こると一気に破綻してしまいます。それと、次々と進化するAIに比べてメカは進展が遅いんですね。

石山メディアで取り上げられている、ロボットも急速に進化しているというイメージとは少し乖離があるんですね。
鈴森そうですね。それに、進化の速さではなく流れそのものが変わってきていると感じます。有史以来、産業革命を通じて発展してきた技術は外敵から生き抜くため、ワットの蒸気機関をはじめパワー、スピード、精度、確実性を目指してきました。たとえば、材料科学では安定した強い材料の研究が主流だったのが、最近は時間が経てば腐って土に還るプラスチックのように、いわば不安定な材料、つまり従来とは逆の価値観に基づいた動きが出てきています。
石山社会が成熟し、人間が長生きするようになった。だから外から内に関心が向くようになったわけですね。介護でも、どうコミュニケーションすれば効用関数や指標自体が高まるかが科学されはじめました。人間の豊かさを求める、いわゆるwell-beingを志向しているといえます。
鈴森そうした時代の流れを踏まえて、ロボティクスが目指す最終的なゴールの一つに生物があります。これは生物を外見的に真似るわけではありません。本質的に学ぶものがあるということで、最近僕は「いいかげんロボット」なるものを提唱して国際学会や学会誌で発表しているんです。「いいかげん」というのは「良い具合」と「無責任」という正反対の意味を持つ面白い言葉ですよね。
石山「適当」も同様ですね。どういった考え方なんでしょうか?
鈴森これまでの科学技術では無責任など許されず、緻密さや正確さが求められるからこそ、非常に精度の高い立派なロボットがつくられてきました。でも、その対象が生物である人になった場合、1ミクロン単位の動作は必要ありません。一方、軽く触る、なぞるというような動作はこれまでのロボットにとっては苦手中の苦手なんですね。だからこそ正確無比につくらなくとも「良い具合」にできるんじゃないか。AIも学習の状態によって答えが違ってくるのはある意味で無責任ですよね。それでも学習を重ねるうちに「良い具合」になっていく。この考え方を論文に書くとき、英訳はどうしようかと各国の人に聞いたんですが、まさに適当な言葉は返ってきませんでした。ポジティブとネガティブをどちらも含んだ日本特有のこの概念を世界に発信していきたいのです。
石山面白いですね! 確かにコンピュータサイエンスのアプローチは、機械学習で用いられる誤差逆伝播法※2からして「いいかげん」です。ちょっとずつ進化しては技術として記述できるようになっていく。ビッグデータがある今の時代なら、アルゴリズムが少し進化するだけで社会的インパクトも大きくなると思います。
鈴森価値観が変わると社会的な影響も出てきますし、ロボティクスの可能性も大きく広がります。そういう意味でソフトロボティクス※3は世界的にブームになっていますね。
石山先ほど、生物が最終的なゴールの一つというお話がありましたが、先生が取り組まれている技術は具体的にどういうものなのですか?
鈴森たとえば人間の足は、股関節に3、膝に1、足首に2、全部で6自由度を持っています。自由度とは自由に動かすことのできる方向の数のことで、この6つを動かすために人間は50もの筋肉を駆使しているんですね。それをロボットに転換すると、動かす対象が6つしかないのに50個のモーターを使うわけです。当然、拘束条件※4があって50個を正確に協調させないと動かすことは難しい。この筋肉とモーターを合わせた機能を持つアクチュエーター※5自身を滑らかに動かすことに取り組んでいて、そこに産業ロボットでは御法度だった柔らかさや「いいかげん」が必要になってくるのです。

写真1 人工筋肉で柔らかく動く筋骨格ロボット。「たとえば膝には普通のロボットではシャフトを入れますが、回転中心が固定されてしまう。ところが人間は軸がブレるので、人工筋肉を使えばそのブレを再現する『いいかげん』な動きにつながるんです。また、人工筋肉は束になっており、空気漏れが生じたら、その1本を交換せず、先を結んで残します。人間の筋力の劣えと同じ仕組みです(笑)」(鈴森教授)

写真2 表紙に登場した阿部智輝さん(工学院 機械系 修士課程2年)の全身を3Dスキャンしてつくった専用パワースーツ。人工筋肉に空気を注入すると脱力していても腕が持ち上がる。介護や福祉での活用を目標に、まずは長時間腕を上げたままの工場作業や農作物収穫などのサポートを目指す。
石山産業ロボットの制御は確かに難しいですね。現在進めている事業の一環で、双腕型のアームロボットにタオルを畳ませようとすると、モーターの数が多く一つひとつの制御はとても困難です。しかしバーチャルリアリティ(VR)で畳み方の映像を取り込み数十回の学習をさせると畳めるようになったり、盛りつけ方を教えるとサラダがつくれるようになったり。一つひとつ整理して進むのではなく、AIを活用して人間の動作をそのまま「いいかげん」に学習させることでスムーズな動きができるようになりますね。
鈴森AIの知能はもちろん、生物の知見も重要です。たとえばオジギソウがありますよね。触ると動いて、おじぎをする。どこがセンサーで、どこがアクチュエーターで、どこが知能かの区別がなく一体で動く。これをロボットで再現するには、多分野との融合や応用をより考えなければいけません。
石山介護の世界でもロボットが重要といわれていますが、難しい課題が2つあります。一つ目は、日本で介護という言葉が生まれてまだ30年くらいしか経っていないこと。介護のメソッドは世界的に多々ありますが、歴史は浅く統合もされていません。人間が人間に対して何をやればいいかというモデルがないので、そもそもロボットに何をさせるかも決められない段階です。二つ目は、仮にモデルができたとしてロボットに実現できるかというステップです。たとえば触覚はケアにおいてとても重要ですが、今のロボットにはなかなか難しい面があります。先生が研究していらっしゃる柔らかいロボットと触れ合った人が「心地いい」と感じられるようになれば道は拓けてきますね。
鈴森介護や福祉のロボットにはいろんなパターンがあります。自然言語でコミュニケーションするAIは広まってきましたし、人が起きるのを力で助ける機械や、介助者が着るパワースーツなどはもう身近にあります。ただ今までのメカにセンサーを貼りつけただけではどう見ても機械で、触れられても心地よくはないでしょう。well-beingにつながるロボットはそうではありません。少し話が逸れますが、ロボットをつくっていると人間や生物のことがわかってくるんです。「なぜこの筋肉がここにあるのか」も、設計していると理解できる。進化の過程で導き出された答えとして、自然界の意図がわかるようなときがあって知的な興奮が得られるんです。非常に面白くもあり、そこにロボティクスの今後に関わるヒントがあるような気がしていますね。

石山柔らかく動くアクチュエーターもセンサーも、各分野との融合によってサイエンスになる側面がありますよね。たとえばカメラで得た介護の非構造化データ※6も、ディープラーニングで解析できるようになると、ロボティクスの進化でケアの一部が代替できるようになります。well-beingの実現を科学する時代になっていくように思います。
鈴森工学というのは人類の発展の歴史そのものといえます。道具からエネルギーへと移り、生き抜くためのものから、やさしさや豊かさを目指す工学へ変わる時期だと感じています。
石山まさにその通りですね。僕は文系から東工大へ理転しましたが、文系のほとんどの人は社会科学の延長線上で社会的な問題を解こうとして、解決できずにいる印象があります。対して、工学的な少し異なるアプローチをすると解けることが多々あるように思います。工学の立場から見れば非常にやりがいがあり、やっぱり楽しい分野ですよね。
鈴森若い学生には、興味があったらぜひそういう道を目指してほしいと思いますね。ただもう一つ思うのは、自分の得意な分野をやらないといけないということです。たとえば3Dプリンタやドローンといった世の中のブームに流されてしまわず、本来得意で本当にやりたいことに取り組むべきだと思います。
石山確かにAIでも、自分が興味のある世界に取り組むことでユニークなポジションを築けることがあります。僕自身、介護や働き方改革にAIを活用することに取り組んでいますが、これまであまり関係がなかった工学やビッグデータの台頭によって、この分野は今後ますます広がっていくと思います。先生としては、ほかに学生の方に持っていてほしい心構えなどはありますか?
鈴森ロボティクスでは「どうせできないだろう」という気持ちが少しでもあると絶対に実現できないんです。以前、全長約20 mのロボットをつくろうと声を出したら、話に乗ってくる学生とそうでない学生がいたんですね。普通だとクレーンみたく重く大きくなって無理だと考えがちですが、使うときにバルーンを膨らませて動かすロボットとして完成しました(写真3、4)。「いいかげんロボット」そのものですね。実現する根拠もありましたし、やはりそういう信念は大切だと思います。僕自身、実は今「いいかげん人工物学会」をつくろうかと考えているんですよ。
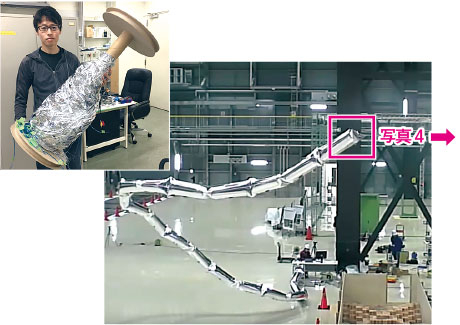
写真3 全長約20 mの軽量かつ安全なロボットアーム。ヘリウムを充填したフィルム風船の構造材で自重補償を行い、アームの関節は細い人工筋肉で動く。膨らむ前は約20 cmの小さなサイズにコンパクトにまとまり、一人でも容易に持ち運びができる。
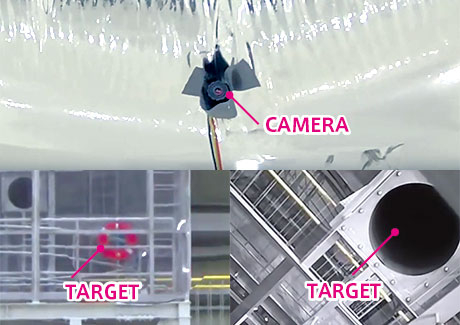
写真4 ロボットアームの先端にはカメラが装着されている。高い建物や塔の内部に自在に入り込み、映像を撮影しながら高所の異常を見つけることが可能。災害現場の初期観察、建造物の点検などに用いることが想定されている。

石山それは楽しそうですね。ぜひ実現してほしいです。僕も東工大の先輩として一言アドバイスさせていただくと、学生自身のセンサーがどう進化していくかも重要だと思います。つまり、ロボティクスやAIの社会的ニーズをどう捉えるかということです。これからのサイエンスは、人間社会の豊かさやwell-beingへの理解をより深めていく時代になります。世界的にはインダストリー4.0※7といわれ、日本ではソサエティ5.0※8という独自の哲学でイノベーションを生んでいこうとしています。社会がますます成熟していく中で、科学技術と大きな社会課題をつなげて見られるかどうか。そういった認知プロセスの視点が東工大の学生にとって大切になってくる気がしています。
鈴森おっしゃるように、ロボティクスやAIの中心に人間を据えて考えることがwell-beingにつながりますね。これからこの分野や東工大を目指す学生にぜひとも伝えたいメッセージです。
自律的な意思決定を行うエージェントをシステムの基本的な構成要素としてモデル化し、システムの全体的な挙動とエージェントのボトムアップ的な挙動とを連携させて考察するための一手法。
機械学習において、人間の脳内の神経回路網を数学モデルで表したニューラルネットワークを学習させる際に用いられるアルゴリズムのこと。バックプロパゲーションとも呼ばれる。
従来の硬く力強く精密なロボットに「柔らかさ」という概念を加えた新しい技術分野。生物のように柔軟に動くロボットの開発が目指されている。
物体の動きのシミュレーションで、各自由度を「自由に動かせる」か「固定する」か定義したもの。たとえば足の膝だけ動かす場合、股関節と足首は固定されているが膝は自由度があるという拘束条件が課されていることになる。
油圧や電動モーターによって、エネルギーを並進または回転運動に変換する駆動装置のこと。
画像、動画、音声、文書など、従来のデータベースモデルのような構造定義を持たない非定型なデータのこと。非構造化データを活用することをビッグデータの活用という場合が多い。
2011年にドイツが提唱した製造業の第四次産業革命。製造業のデジタル化により新しいビジネスモデルや価値をつくり出すことを目的とした国家的戦略的プロジェクト。
日本政府が提唱する科学技術政策の基本指針のひとつ。IoT、ロボット、AI、ビッグデータ等の新技術を産業や社会生活に取り入れてイノベーションを創出し、社会的課題を解決する新たな社会のこと。

鈴森康一
東京工業大学 工学院 教授
横浜国立大学 大学院工学研究科 博士課程修了。1984年より、株式会社東芝総合研究所(現 研究開発センター)勤務。1999年より、財団法人マイクロマシンセンター勤務。2001年より岡山大学教授を経て2014年より東京工業大学教授。2016年に東工大と岡山大学の両大学発ベンチャー企業s-muscle(エスマスル)を設立し、空気圧で動作する細径人工筋肉の販売を開始。2017年に人工筋肉を使った筋骨格ロボットで攻殻機動隊 REALIZE PROJECT 「the AWARD 2016」『義体(ロボット)』部門グランプリ受賞。ロボティクス研究分野において受賞歴・メディア出演ともに多数。著書に『ロボットはなぜ生き物に似てしまうのか』『アクチュエーター工学入門』。工学院機械系担当。
鈴森・遠藤研究室
新しいロボットやメカトロニクス機構の実現を目指し、機能デバイス開発からシステム構築、フィールド研究まで幅広く研究を進めている。 主な研究課題に、人工筋肉とロボット応用、ソフトロボティクス、油圧タフロボティクス、身体サポートロボティクス、マイクロロボティクスなど。


石山洸
株式会社エクサウィザーズ 代表取締役社長
2004年、中央大学 商学部卒業。2006年、東京工業大学 大学院総合理工学研究科 知能システム科学専攻 修士課程修了。2006年、株式会社リクルートホールディングスに入社。同社のデジタル化を推進した後、新規事業提案制度での提案を契機に新会社を設立。事業を3年で成長フェーズにのせ売却した経験を経て、2014年、メディアテクノロジーラボ所長に就任。2015年4月、リクルートのAI研究所であるRecruit Institute of Technologyを設立し、初代所長に就任。2017年、デジタルセンセーション株式会社取締役COOに就任。2017年10月の合併により設立された株式会社エクサウィザーズの代表取締役社長に就任。政府が主導する人工知能技術戦略会議ベンチャー育成・金融連携タスクフォース副主査。静岡大学客員教授、東京大学政策ビジョン研究センター客員准教授。

本インタビューは東京工業大学のリアルを伝える情報誌「Tech Tech ~テクテク~ 34号(2018年9月)」に掲載されています。広報誌![]() ページから過去に発行されたTech Techをご覧いただけます。
ページから過去に発行されたTech Techをご覧いただけます。

スペシャルトピックスでは本学の教育研究の取組や人物、ニュース、イベントなど旬な話題を定期的な読み物としてピックアップしています。SPECIAL TOPICS GALLERY から過去のすべての記事をご覧いただけます。
(2018年取材)