研究
研究
![]()
![]()

vol. 44
情報理工学院 情報工学系 教授
石井秀明(Hideaki Ishii)
自動運転やスマートグリッドの推進などに伴い、フィジカル空間(現実空間)にある機器をサイバー空間(仮想空間)にあるICT(情報通信技術)によって最適に制御する「サイバーフィジカルシステム」の重要性が増している。このような中、サイバーフィジカルシステムに関する制御理論の研究で分野をけん引し続けているのが、情報理工学院 情報工学系の石井秀明教授だ。
私たちは日々、スマートフォンやパソコンを使い、インターネットを通じて、世界とつながっている。常に新しい情報に接し、メールやSNSによって自らも発信している。一方で、ICTで密につながっているのは人間だけではない。家電製品や自動車を含めて、今や多くの機器もネットワークを介して通信し、時々刻々と制御されているのだ。

たとえば、現在、自動車には約70個もの電子制御ユニットが搭載されており、エンジン、ブレーキから空調に至るまで、あらゆるものが車内ネットワークを通じて制御されている。今後、自動運転が進めば、通信は車内の機器に留まらず、自動車間や街中に設置された各種センサー間など外部ネットワークへと拡大し、より高度な制御が実現するだろう。
また、制御の果たす役割は、エネルギー分野においても重要性が増している。現在、地球温暖化防止に向け、スマートグリッドの導入が推進されている。スマートグリッドとは、ICTを活用して電力の需給をリアルタイムに自動制御し、効率良く電力を分配する機能を備えた電力網のことだ。それにより、発電設備の最適化や再生可能エネルギーの導入の促進が期待されている。
このように、フィジカル空間にある機器をサイバー空間にあるICTを使って制御するシステムのことを「サイバー
フィジカルシステム」という。機器とICTを連携させ、サイバー空間でデータ解析した結果を機器にフィードバックすることで、環境の変化などに応じて、機器をより最適に制御することができる。自動運転やスマートグリッドに限らず、ロボットによる災害対応やドローンによる空中輸送などさまざまな分野で重要性が増している。
サイバーフィジカルシステムに早くから着目し、その制御理論を研究しているのが、情報理工学院の石井秀明教授だ。石井は、制御理論とICTを融合する上での本質的な課題にいち早く気付き、そのための理論を研究した業績が高く評価され、2021年には、電気・電子工学と情報工学で世界的に最も権威のある学会IEEE(米国電気電子学会)のフェローの称号を授与されている。
現在、石井は、制御工学を柱に「(1)通信制約、(2)大規模ネットワーク・マルチエージェント、(3)セキュリティ・学習」の3方向で、サイバーフィジカルシステムに関する理論の研究を進めている(図1)。それぞれの研究内容を順番に紹介していこう。
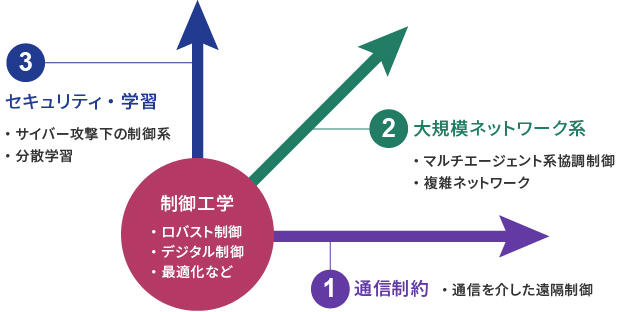
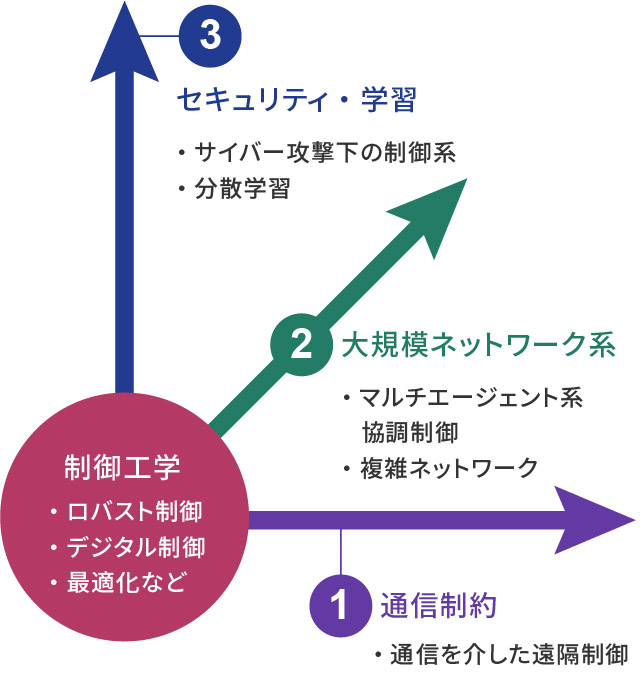
図1. サイバーフィジカルシステムに関する理論研究の3つの軸
まず、(1)通信制約についてだ。
石井は、ネットワークを介した制御の歴史をこう語る。「1990年代より、自動車や工場などにネットワークが導入されました。しかし、エンジンやブレーキを制御する場合、スマートフォンやパソコンでインターネットを閲覧するのとは違って、伝送遅延が大きな問題となります。ブレーキを踏んでから止まるまでにほんの0.5秒遅れただけでも、大事故になりかねませんから。また、複数のシステムが1つの通信ネットワークを共有している場合、どのシステムが優先的に使うべきか、優先順位の判断も極めて重要です」
このように、制御に使われる通信ネットワークには特有の制約条件がある。「しかし、1990年代には、こうしたシステムにおける理論的な問題には誰も目を向けていませんでした。このことを2000年頃に最初に問題提起したのが、ハーバード大学のロジャー・ブロケット教授でした。当時、私はカナダのトロント大学電気工学科の博士課程学生でしたが、通信ネットワークが制御工学にもたらす新たな可能性に気付き、博士論文のテーマとすることに決めたのです。これは私にとって大きな転換点となり、現在に至るまで制御理論を情報と通信の理論と結びつける研究をおこなっています。アメリカの数学者ノーバート・ウィナー(1894~1964)が、『サイバネティックス』という著書を通じて、1948年に制御と通信の技術の融合を提唱しましたが、実際に系統立った理論研究がなされたのは、この20年とも言え、興味深いです」(石井)
通信制約の下、刻々と変化する不安定なシステムをネットワーク化制御によって安定化させる基礎的な例として、石井は「倒立振子」を挙げる。
これは、台車の上に、360度どの方向にも倒れることができる棒が立っており、モーターを使って台車を動かすことで、棒が倒れないように制御するというものだ。センサーを使って台車と棒との角度をリアルタイムに計測し、その角度に基づき、棒の姿勢を制御する。台車の代わりに、手のひらに立てた細長い棒を、手のひらを前後に動かすことで倒れないようにすることをイメージするとわかりやすいだろう。

「角度を測るセンサーと、台車の動きを決める制御装置は、通信ネットワークで接続されているとします。このとき、制御で用いる通信量を減らすには、センサーから送られてくる計測データの量をできる限り減らす必要があります。その限界値を明らかにすることが重要です」(石井)
そこで、石井が考えたのが、「量子化制御」といわれる方法だ。棒は360度どの方向にも倒れることができるが、例えば360度を30度ずつ12の領域に分け、棒がどの領域にいるかを計測する。このように、連続的な値をとる物理量を、離散的な値に変換して制御することを量子化制御という。これにより、情報量を大幅に減らすことができる。極端な場合として、領域を2つまで減らすことも考えられる。しかし、棒がまっすぐ立った状態から右もしくは左に傾いたという情報だけでは、棒はすぐに倒れてしまうだろう。そこで、このシステムの物理的なモデルとなる数式を用いて、動きを予測しながら制御することが必要となる。
石井は説明を続ける。「不安定なシステムにおいては、不安定さの度合いを表す『不安定極』と呼ばれる値があります。倒立振子の場合、棒の質量と長さによって不安定極が決まります。同じ質量であれば、長いほど安定性が高まります。興味深いのは、理論的に最低限必要な通信ネットワークの速さは不安定極の値のみで決まるという点です」
次に、(2)大規模ネットワーク・マルチエージェントに移ろう。
(1)通信制約では、自動車の制御に関する例を紹介した。これは、1台の自動車に関する制御の話だったが、今後、自動運転が進めば、自動車同士や、街中の各種センサーとの通信ネットワークを介した制御が進む。これが、(2)大規模ネットワーク・マルチエージェントに関する研究だ。
マルチエージェントとは、多くのエージェントが存在し、各々のエージェントは自律的に意思決定を行っているが、システム全体として特定の挙動を目指すものをいう。
マルチエージェントの研究対象は幅広く、自動車の自動運転やドローンの飛行制御、無線通信を用いたセンサーネットワークなどへの応用が盛んに研究されている。さらには、その数式モデルを用いれば、新型コロナウイルス感染症やSNS上で人の意見がどのように広がるか、頭の中で脳神経がどのように同期するか、といった現象などもマルチエージェントとして扱うことができる。石井はこのマルチエージェントを、制御理論の観点からとらえ直し、その制御方法を研究している。

センサネットワーク
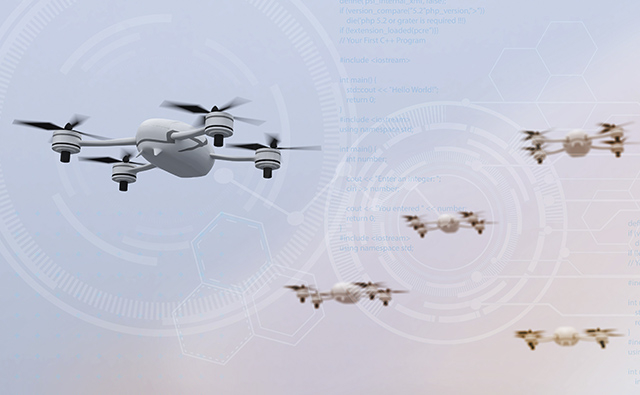
ドローンの編隊飛行
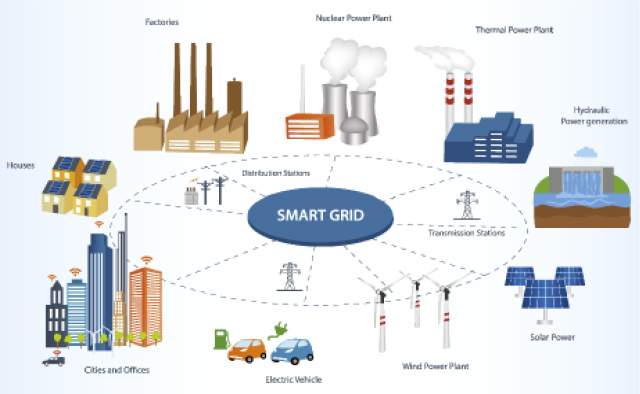
スマートグリッド
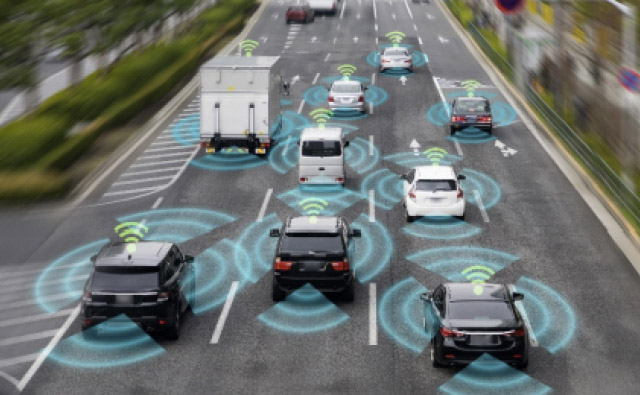
自動運転
基礎となる考え方として、石井は、鳥や魚の群れによる集団行動を例に挙げる。
集団にはリーダーは存在せず、個々は自律して、自分の意思で方向や速度を変えている。しかし、群れとしてまとまって一定方向に進みたいという意思があるとしよう。個々は近くにいる仲間しか見えていない。
このようなマルチエージェントにおいては、エージェント間での情報伝達がポイントとなると石井は語る。図2は、グラフと呼ばれる数学の表現方法で、〇はエージェントを、〇と〇をつなぐ矢印はエージェント同士のつながり、すなわち、情報伝達が行われることを示している。
「図2では、8個のエージェントがいて、互いに限られた仲間のエージェントと情報交換しながら、自分が進む方向を更新しています。方向を一致させるとは、自分の方向と他のエージェントの方向との間の角度の差が0になるということ。この状態をアルゴリズムの分野では、『合意』といいます。『合意問題』は、マルチエージェントを考える上で非常に重要な問題です」(石井)
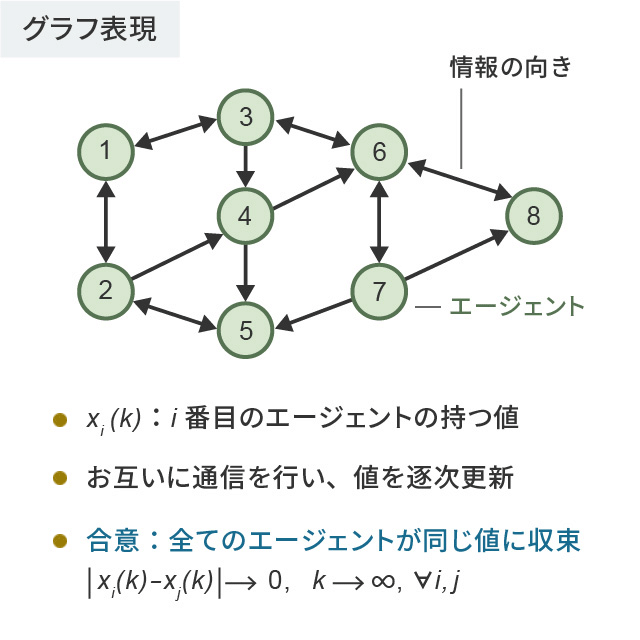
図2. エージェントのネットワーク
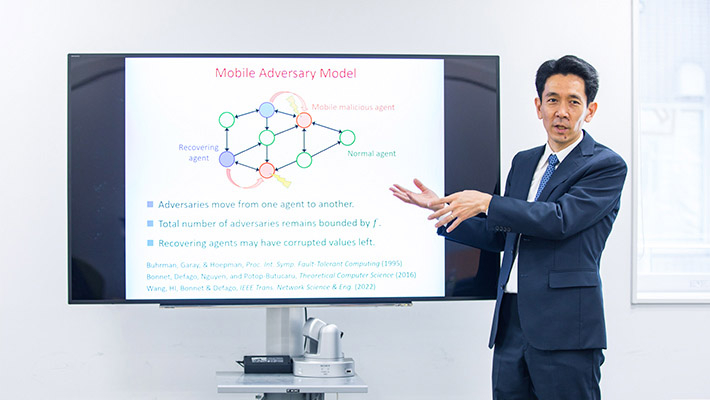
とくに最近は、ネットワークに、異常な行動をとるエージェントが含まれる場合に対する、合意アルゴリズムの研究も盛んに行っている(図3)。「群れの中に、仲間を気にしない、自分勝手なエージェントがいたとします。全員で合意できたとしても、そのようなエージェントに振り回される結果となっては、安全なシステムとは言えません。このように、他と大きく異なる動きをするエージェントに関しては、『無視する』ことで、システムとしてはうまく機能します。一方で、異常な行動をとるエージェントをいくつまでなら許容できるか、という新たな課題がでてきます」(石井)
ここでのポイントは、ネットワーク内のエージェント間のつながりが密であるほど、許容できる異常なエージェントの数が増えるということだ。これは情報分野の分散アルゴリズムの課題でもあるが、石井の研究により、ネットワークが最低限満たすべきつながりに関する条件が明らかになった。
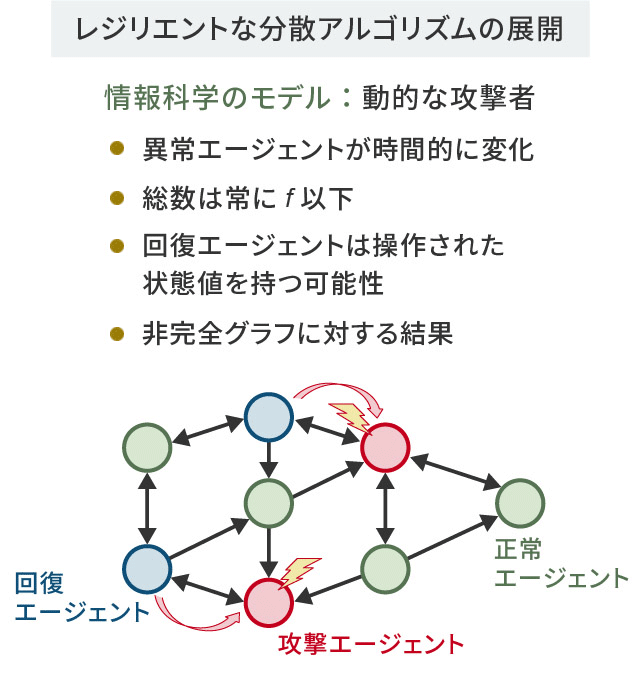
図3. 異常エージェントを含むマルチエージェントにおける合意
こうした研究は、自律的な分散制御の安全な運転とも直結している。「エネルギー分野におけるスマートグリッドでの分散制御にも取り組んでいますが、故障や異常の影響を受けにくい、自律的な分散制御に関する研究は今後ますます盛んになっていくといえるでしょう」(石井)
実際、石井は大規模なサイバーフィジカルシステムにおけるセキュリティの研究も手がけており、最後の(3)セキュリティ・学習の研究につながる。
通信ネットワークを介した制御の場合、悪意のある誰かが情報を改ざんして、想定とは異なる制御が実行されるリスクが危惧される。そこで、石井は、どの程度の攻撃であればシステムが耐えられるか、制御理論の立場からセキュリティについて研究している。
大規模なサイバーフィジカルシステムにおいては、図4のように、フィジカル空間の物理ネットワークと、サイバー空間の制御通信ネットワークがあり、局所的な制御や監視の情報を通じて連携している。
「たとえば、通信ネットワークへの攻撃として、通信妨害や制御情報の改ざんが想定されます。こうした攻撃が怖いのは、制御の指令信号が変えられ、フィジカル空間における機器が異常動作を起こしうる点です。私が現在、取り組んでいるのは、攻撃があったことを、フィジカル空間とサイバー空間の両面から検知するための方法の理論研究です」(石井)
物理ネットワークを標的にしたサイバー攻撃を検知し、ロバストに制御するための分散型システム機構
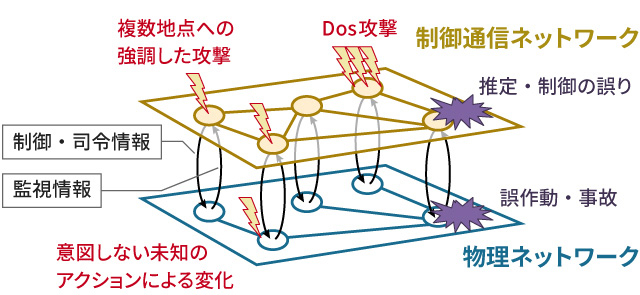
図4. サイバーフィジカルセキュリティ
こうした研究は、これまで制御理論にはなかった新たな視点をもたらしている。攻撃者の立場から、いかにシステムにとって都合の悪い制御を行うか、という従来とはまったく逆向きの問題を考えることになるからだ。無論、その上で、より安全なシステムの構成法を提案するのが石井の仕事だ。また、人工知能(AI)にサイバー攻撃の通信パターンなどを機械学習させることで性能の向上を図る研究なども行っている。
「このように、大規模なサイバーフィジカルシステムの普及が進む中、制御と情報・通信の融合領域の理論研究は、急速に重要性を増していると感じています」(石井)
そもそも石井が制御理論の研究者になろうと思ったきっかけは何だったのだろうか。
「私は帰国子女ということもあり、将来、国際的な仕事をしたいと漠然と思っていました。どの道を選ぶか迷っていた筑波大学2年生の頃、理論研究に興味を持ちました。特に、ルドルフ・カルマン(1930~2016)という著名な工学者が1960年代にほぼ一人で制御理論の基礎を打ち立てたという逸話に強く惹かれ、この分野に進む決意をしました。機械・電気・航空等の工学分野を跨いでシステム制御に共通する基盤となっている点も魅力でした」

その後、京都大学の修士課程に進み、修了後は、トロント大学の博士課程へ進んだ。さらにアメリカのイリノイ大学のポスドク研究員などを経て、2007年に東京工業大学にやって来た。「現在は、世界中の研究者たちと学際的な共同研究ができていることがとても楽しいですね。それが研究の醍醐味(だいごみ)です」(石井)
最後に、研究者を目指す若い人たちに向けてメッセージをくれた。「研究者としてやっていくためには、深く考えることと、長期的な継続が大切です。自分の好きな分野を見つけるのと合わせて、自分に合ったやり方を探すとよいと思います。たとえば、理論研究というと一人で取り組むイメージかと思いますが、ディスカッションを通じて、異なる分野の研究者と共同で新たな分野を開拓することも、ますます重要になっています。そこでは、国際的な研究活動も必須になります。そのためには、英語力の向上も含めて、早めの留学を強くおすすめします。ぜひ好奇心を持って、広い意味で、研究のネットワークを広げてほしいと思います」

石井秀明(Hideaki Ishii)
情報理工学院 情報工学系 教授

スペシャルトピックスでは本学の教育研究の取組や人物、ニュース、イベントなど旬な話題を定期的な読み物としてピックアップしています。SPECIAL TOPICS GALLERY から過去のすべての記事をご覧いただけます。
2023年10月掲載