Our mission is to solve the problems Japan faces today
"Robot research can be summed up simply as the study of achieving a specific goal. The reason for creating a robot in the first place, of course, is very important. There are plenty of interesting areas of research that may not be particularly useful to society, but my personal motivation in studying robots has always been to create something truly useful to people. Essentially, I wanted to use my knowledge and skills to some purposeful end. Therefore, it did not necessarily have to be in the field of robotics."
A robot scientist internationally renowned for his development of many unique robots, Hirose comments on his purpose in studying robots. He continues by saying,
"At the moment Japan is facing many daunting problems. Among these are the post-accident cleanup at Fukushima No. 1 Nuclear Plant and dealing with aging infrastructures and buildings, typified by the recent collapse of the Sasago Tunnel. I believe that offering optimal solutions to pressing problems like these is the mission that people like myself and my colleagues at Tokyo Institute of Technology have been assigned. I firmly believe that only when we fulfill this mission can we expect to be recognized by people in society."
It was April 1971 when Hirose joined the Department of Control Engineering in Tokyo Institute of Technology's Graduate School of Science and Engineering as a graduate student. Specializing in mechanical and control engineering, he successfully completed his doctorate in 1976. After successively serving as assistant and associate professor, in 1992 he became a professor in the Department of Mechanical Sciences and Engineering, now the Department of Mechanical and Aerospace Engineering. Soon to celebrate his 65th birthday, Hirose will end the robot-scientist chapter of his life at Tokyo Institute of Technology, which spans more than 42 years. During his time at the Institute, Professor Hirose mentored 41 doctoral students and more than 300 master's degree students.
Upon retirement, Hirose plans to carry on his activities in robot research from his new base at HiBot, a venture company launched by graduates and visiting international students from Hirose's laboratory at Tokyo Institute of Technology. "HiBot," an abbreviation of "Hirose Laboratory Robot," is an enterprise that engages in the development and sale of cutting-edge robots as well as control and drive components essential for robotic control.

ACM-R5 is an amphibian, snake-like robot. The mechanism the snake uses to propel itself by wriggling its body is almost the same on land and in water. To simulate this mechanism, Hirose attached paddle blades to the sides of the robot's body to create an edge against the water for propulsion. He then attached small wheels to the paddle blades to enable the robot to move swiftly on the ground as well.
Through HiBot, Hirose has already received numerous requests from various groups for advice in relation to the accident at the nuclear power plant in Fukushima. This is because there are so many pressing tasks at the site of the accident that can only be performed by remote-controlled robots, such as the removal of radioactive contaminants inside nuclear reactors and the subsequent dismantling of the nuclear reactors themselves.
People are pinning their hopes in particular on the snake-like amphibian robot, the ACM-R5, as the "only robot capable" of carrying out this mission. ACM-R5 was first introduced to the public at the 2005 Aichi Expo in Japan, where it attracted considerable attention. At the site of the nuclear power plant accident, where rubble is still scattered about and contaminated water has leaked, a robot capable of penetrating through gaps as small as 10 centimeters is needed to assess internal conditions. At the moment, ACM-R5 is considered to be the only robot capable of conducting such a mission.
A snake-like robot that astounded scientists of robot technology around the world.
It was the ACM III, a snake-like robot completed in 1972 that first made Hirose's name widely known in the field of robot research. This robot is the forerunner of ACM-R5.
"At that time, I was just about the only one studying snake-like robots worldwide, so no matter what conference I took my robot to, it always attracted attention," Hirose recalls.
In fact, the very reason Hirose decided to do his master's at Tokyo Institute of Technology was because he wanted to create a soft, flexible machine.
"Being of the Sputnik generation, I was interested in space and rockets as a student at Yokohama National University. When I looked at my fellow students nearby creating robots, I couldn't help but think how boring their work was. One day, however, as I was reading a book by Professor Emeritus Masahiro Mori of Tokyo Institute of Technology, who was known by the nickname 'Dr. Robocon,' I noted in particular his description of the 'excitement of soft, flexible machines' and I suddenly had a strong desire to create with my own hands machines that were soft and flexible."
I then joined the laboratory of Professor Yoji Umetani at the Institute, where my first challenge was to develop a snake-like robot.
There were two main reasons for choosing a snake for the motif of my robot. The first was my aspiration as an engineer. I felt that perhaps if I succeeded in creating a long, thin robot capable of smooth, supple movement, it could be useful in various applications such as disaster rescues or inspecting piping, for example. At the same time, I had an interest in snakes from the perspective of physical science. I wanted to explore from a mechanical perspective how, without any legs, they can move so quickly and smoothly, climbing up trees or swimming in water.
In 1971, when Hirose began his research and development of robots, not a single scientist was engaged in studying the mechanisms of a snake's movements from the perspective of mechanics. Therefore, Hirose had to start his project by investigating and analyzing in detail an actual snake's movements.
"At that time, there was a restaurant in Miyamasuzaka in the Shibuya district that served snake dishes. I found out that this restaurant also sold live snakes, so I went there right away to purchase some. In all, I bought perhaps six or seven Japanese striped snakes (Elaphe quadrivirgata) that cost me 1500 yen each," Hirose comments.
Releasing a snake onto a stretch of artificial turf, Hirose began to observe its movements with enthusiasm. The moment Hirose picked up one of the snakes, he noticed that the edge of its belly was shaped like the blade of an ice skate. The structure of the scales on the snake's belly facilitates smooth forward and backward movement. However, the edge of the belly itself is angular and serves a purpose similar to that of the edge of an ice skate, allowing the snake to gain propulsion from it according to the same principle.
To study the movement of a snake's musculature in detail, Hirose attached a number of electromyographs to the snake's body and recorded and analyzed the data. Sometimes he attached the shed skin of a snake to a wooden block the same weight as the snake and experimented by pulling it. He also placed obstacles such as pieces of wood or marbles on the artificial turf to investigate how the snake moved among or over them.
In addition, Hirose discovered that although a snake does not lift its body when moving slowly, it bends its body significantly and partially lifts it when moving swiftly. Hirose felt that there must be a mechanical reason for this and tried to shed light on this point. He also found that the curves the snake makes when moving also followed a certain law of nature. This resulted in his establishment of a mathematical formula, which he named the "Serpenoid Curve."
As he explored the mechanisms of a snake's body movement, Hirose went ahead and developed a snake-like robot out of aluminum and steel.
"I will never forget the excitement at the time of the ACM III's trial run on December 26, 1972. This machine was just like a snake and started to move with the suppleness of a living creature. I was instantly mesmerized by this robot."
Hirose continued his observation of snakes and improved his snake-like robot. In 1976 he was awarded his doctorate largely in recognition of these achievements.
After this, Hirose continued his efforts and, working jointly with students in his laboratory, he developed a range of unique snake-like robots. Among these are the ACM-R4, a robot that can work adeptly in locations with many obstacles, and the Slim Slime, a unique snake-like robot that moves by expanding and contracting through the use of air pressure. One of these, the ACM-R5, is expected to be used for cleanup operations at the Fukushima No. 1 Nuclear Power Plant.
"At the beginning of its development, we thought that its scope of application in disaster rescue work could be broadened by making it an amphibian machine, and I was very pleased to find out that it just so happens that it will be very useful in the post-accident cleanup work at the nuclear power plant."
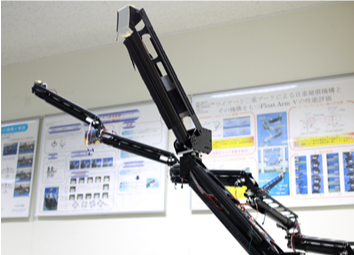
Applying the principles of his snake-like robots, Hirose also developed a hand-type robot that can grasp things gently, and an arm-type robot that stretches out lithely during operation. At the request of the Nissan Motor Company in 2008, Hirose developed robots based on the principles of these two robots to assist workers at automobile assembly plants, and received the Carlos Ghosn Award for his outstanding contribution.
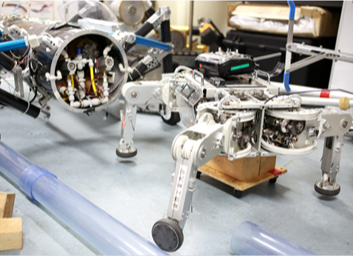
In tandem with the development of snake-like robots, Hirose also started developing a robot that climbs up stairs on legs. After coming across a daddy longlegs, on one occasion, Hirose became keenly interested in its mechanical movements and set about developing a robot with six legs based on this insect. In the second model he completed in 1979, Hirose succeeded in getting the robot to climb an entire set of stairs without falling by outfitting it with tactile sensors. This robot caught the attention of a professor from Ohio State University and led to an invitation for Hirose to participate in a project by DARPA (Defense Advanced Research Project Agency) in 1980.
Responding to requests from governments and private sector companies, Hirose continued to develop robots one after another throughout his career. Many of these were designed to take the place of humans in scouting and observation work at sites where it is too dangerous for humans to work. Robots he developed include robots for removing anti-personnel mines, planet exploration robots, underwater exploration robots, and robots to work inside plumbing pipes. It is estimated that Professor Hirose has developed well in excess of 100 robots.
Countless failures, but never one setback
Whatever the circumstances, Hirose effortlessly appears to be a fount of creativity with one unique idea after another simply bubbling to the surface. When asked about this, he replied nonchalantly:
"In my case, I think you could say my situation is like the well-known story of Unkei. I feel I simply give form to images that well up in my mind just as they appear. In fact, in my research on robots the most enjoyable time for me is the moment that an image appears."
"In his novel 'Ten Nights of Dreams,' the author Natsume Soseki describes Unkei, a genius sculptor of Buddhist statues during the Kamakura Period, like this. As the main character of the story watches Unkei sculpt a statue of the two guardian Deva kings, the man standing next to him exclaims, 'All that Unkei is doing is simply digging out the figures buried inside the timber.'"
But even with someone like Hirose, it would be a rare robot to reach completion in the exact image of its original conception.
"Because a robot is an entire system, it cannot be completed if even one small part of it does not function. Having to rebuild the whole thing from scratch due to a minor adjustment is a daily occurrence in our work. Because of this, I have had countless failures throughout my career. But I have never had even one setback. The moment a failure occurs, all I can think of is what I can do to succeed," says Hirose matter-of-factly. This frame of mind is what continually opens new pathways for Hirose.
Hirose is relentless in his efforts to improve his robots even after completion. This is why the development of more than a few of his robots is an ongoing process that takes 10 years or more. Hirose's laboratory is crowded with such robots.
"Furthermore, while it is a fact that I have started the development of some of my robots with a snake or spider in mind, I certainly do not believe that anyone should adhere to one idea as a source of inspiration. It does not really matter from what source you draw inspiration. What is important is the purpose in developing the robot. This is why I try to make students who come to my laboratory think deeply about what they hope to achieve through their research on robots, so that they will think carefully about their direction and goals."
"For example, there are some researchers who are developing robots that can iron clothes. The reason people iron clothing is to smooth out the wrinkles in the cloth. But my view of this situation would be that it is smarter to develop materials that do not require ironing such as shape-memory fiber. This is why I cannot blindly go along with the idea of having robots take over work originally done by humans."
Efforts to foster the development of the next generation, from children to graduate students
What kind of knowledge and skills are needed to become a robot scientist? Hirose replies,
"It goes without saying that theoretical knowledge such as mathematics and physics are essential, but I also believe engaging in creative activities from childhood, such as handicrafts, is vital. More than anything, these activities help children develop their perception of form and movement in a visual, three-dimensional way. Often in the past, when I wanted to share an image with students, I felt unable to do so easily, as they lacked these tactile experiences. This was frustrating at times. In the end, some students even suggested, 'Professor, how about using a mathematical formula to illustrate it!'"
As a child, Hirose was the type of boy who preferred playing indoors and doing handicrafts rather than running around outdoors. He not only enjoyed taking clocks apart but also making things like radios with his own two hands. When he was in high school, one of his chores at home was to fill the bath with water each day. Forgoing the use of electronic circuits, he challenged himself to create a device that would whistle when the water in the bathtub reached a certain level.
Hirose is keen to help children learn the joy and importance of creating things with their own hands. This is why he has been hosting the Robot Grand Prix, sponsored by the Japan Society of Mechanical Engineers and has served as chairman of the organizing committee since 1997.
Hirose contributed significantly to the establishment of the Integrated Creative Workshop in the Ishikawadai Building 3 on the Okayama Campus. The Department of Mechanical Sciences and Engineering, the predecessor of Department of Mechanical and Aerospace Engineering, focused primarily on theory while practical production was considered somewhat inferior. Believing both aspects to be important, Hirose encouraged the department to raise money and refurbished an old building in which to set up a studio, which was later merged with another studio and became the Integrated Creative Workshop. Today this workshop is a center for creative education where various activities and events such as the Street Performance Robot Contest are held.
Hirose is also passionate about the education of the next generation that broadly includes young people of all ages from elementary school children, to high school students to graduate students in doctoral courses. He devotes himself to promoting education through his work as chairman of the National Boys and Girls Challenge Creation Contest sponsored by the Japan Institute of Invention and Innovation. As professor of the Super Robotics Program at the Waseda Prep School, he also aims to inspire teens to become top engineers capable of solving problems in society.
"I feel ever so grateful to Tokyo Institute of Technology for allowing me to pursue my study of robots for the past 42 years. I will not be idle even after my retirement. With renewed determination, I intend to continue to devote my efforts to the research and development of robots that will be useful to society and also to the education of the next generation," says Hirose, filled with both a sense of satisfaction and conviction about his mission.
Shigeo Hirose
2013 |
Professor Emeritus, Tokyo Institute of Technology |
2011 |
Distinguished Professor, Mechanical and Aerospace Engineering, Graduate School of Science and Engineering |
1992 |
Professor, Department of Mechanical Sciences and Engineering, School of Science and Engineering |
1979 |
Associate Professor, Department of Mechanical Sciences and Engineering |
1976 |
Assistant Professor, Department of Mechanical Sciences and Engineering
Doctor of Engineering, Department of Control Engineering, Graduate School of Science and Engineering, Tokyo Institute of Technology |
1947 |
Born in Tokyo |
Major Awards
2009 |
Joseph F. Engelberger Robotics Awards |
2006 |
Purple Ribbon Medal |
1999 |
Pioneer Award, IEEE Robotics and Automation Society |
The Special Topics component of the Tokyo Tech Website shines a spotlight on recent developments in research and education, achievements of its community members, and special events and news from the Institute.
Past features can be viewed in the Special Topics Gallery.